数据集#
Autoware 合作伙伴提供用于测试和开发的数据集.这些数据集可在此处下载.
伊斯坦布尔开放数据集#
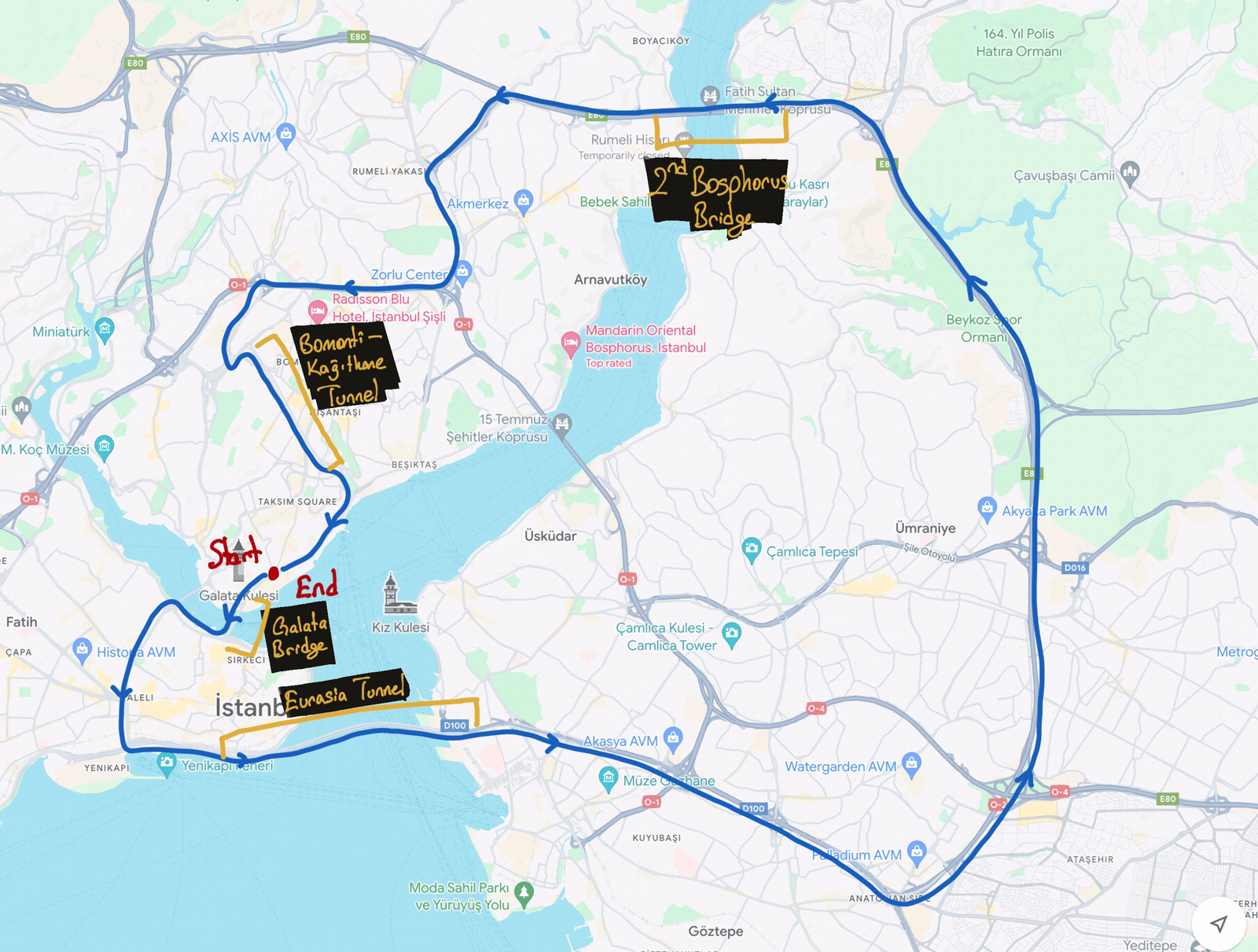
数据集的采集方式如下.隧道和网桥在图像上进行了注释. 数据集中包含的特定区域包括:
- 加拉塔大桥(小桥)
- Eurasia Tunnel (高程变化的长隧道)
- 第 2 博斯普鲁斯海峡大桥(长桥)
- Kagithane-Bomonti 隧道(小隧道)
- 高架桥、路口、高速公路、人口稠密的市区......
center>
Leo Drive - 标测套件传感器数据#
此数据集包含来自便携式绘图工具包的数据,用于一般绘图目的.
数据包含来自以下传感器的数据:
- 1 x Applanix POS LVX GNSS/INS 系统
- 1 x 禾赛 Pandar XT32 激光雷达
**对于传感器校准,添加了 /tf_static 主题.
数据链接#
- 您可以找到生成的完整点云地图、角特征点云地图和 Surface Feature Point Cloud 地图如下:
- https://drive.google.com/drive/folders/1_jiQod4lO6-V2NDEr3d-M3XF_Nqmc0Xf?usp=drive_link
- 导出的点云是通过 0.2 米和 0.5 米体素网格的下采样导出的.
- 您可以找到与映射数据同时收集的 ROS 2 包:
- https://drive.google.com/drive/folders/17zXiBeYlM90gQ5hV6EAWaoBTnNFoVPML?usp=drive_link
- 由于同时收集数据,我们可以假设点云地图和 GNSS/INS data 是此 rosbag 的 Ground Truth 数据.
- 此外,您可以在以下链接中找到用于映射的原始数据:
- https://drive.google.com/drive/folders/1HmWYkxF5XvVCR27R8W7ZqO7An4HlJ6lD?usp=drive_link
- 点云将作为 PCAP 采集,并将要素匹配的 GNSS/INS 数据导出为 txt 文件.
使用 Autoware 进行定位(Localization)性能评估#
当前 Autoware 的性能评估报告以及收集的数据可以在下面的链接中找到.
记录在 2024-08-28 的报告.
主题列表#
为了收集 GNSS/INS 数据,使用了 this 存储库.
为了收集 LiDAR 数据, 星云 repository 的 Repository 中.
| 主题名称 | 消息类型 |
|---|---|
/applanix/lvx_client/autoware_orientation |
autoware_sensing_msgs/msg/GnssInsOrientationStamped |
/applanix/lvx_client/imu_raw |
sensor_msgs/msg/Imu |
/localization/twist_estimator/twist_with_covariance |
geometry_msgs/msg/TwistWithCovarianceStamped |
/applanix/lvx_client/odom |
nav_msgs/msg/Odometry |
/applanix/lvx_client/gnss/fix |
sensor_msgs/msg/NavSatFix |
/clock |
rosgraph_msgs/msg/Clock |
/pandar_points |
sensor_msgs/msg/PointCloud2 |
/tf_static |
tf2_msgs/msg/TFMessage |
消息解释#
传感器使用的驱动程序以默认的 ROS 2 消息类型及其自己的 ROS 2 消息提供输出 types 以获取更多信息.以下主题是默认的 ROS 2 消息类型:
-
/applanix/lvx_client/imu_raw- 给出 ENU 中 INS 系统的输出.由于 9 轴 IMU,
yaw值表示 sensor的航向值.
- 给出 ENU 中 INS 系统的输出.由于 9 轴 IMU,
-
/applanix/lvx_client/twist_with_covariance- 给出传感器的扭转输出.
-
/applanix/lvx_client/odom-
给出传感器从 ROS 2 驱动程序起点开始的位置和方向. 实施方式
GeographicLib::LocalCartesian.本主题与车轮里程计无关.
-
-
/applanix/lvx_client/gnss/fix-
给出传感器的纬度、经度和高度值.
WGS84 椭球体的椭球体高度为高度值.
-
-
/pandar_points- 提供来自 LiDAR 传感器的点云.
Bus-ODD (Operational Design Domain) 数据集#
Leo Drive - 五十铃传感器数据#
此数据集包含来自 Bus ODD 项目中使用的 Isuzu 巴士的数据.
数据包含来自以下传感器的数据:
- 1 个 VLP16
- 2 个 VLP32C
- 1 个 Applanix POS LV 120 GNSS/INS
- 3 x Lucid Vision Triton 5.4MP 摄像头(左、右、前)
- 车辆状态报告
它还包含传感器之间静态转换的 /tf 主题.
必需的消息类型#
GNSS 数据以 sensor_msgs/msg/NavSatFix 消息类型提供.
但是,Applanix 原始消息也包含在 applanix_msgs/msg/NavigationPerformanceGsof50 和 applanix_msgs/msg/NavigationSolutionGsof49 消息类型中.
为了能够播放这些消息,您需要构建并获取 applanix_msgs 包.
# Create a workspace and clone the repository
mkdir -p ~/applanix_ws/src && cd "$_"
git clone https://github.com/autowarefoundation/applanix.git
cd ..
# Build the workspace
colcon build --symlink-install --packages-select applanix_msgs
# Source the workspace
source ~/applanix_ws/install/setup.bash
# Now you can play back the messages
此外,请确保还获取 Autoware Universe 工作区.
下载说明#
# Install awscli
$ sudo apt update && sudo apt install awscli -y
# This will download the entire dataset to the current directory.
# (About 10.9GB of data)
$ aws s3 sync s3://autoware-files/collected_data/2022-08-22_leo_drive_isuzu_bags/ ./2022-08-22_leo_drive_isuzu_bags --no-sign-request
# Optionally,
# If you instead want to download a single bag file, you can get a list of the available files with following:
$ aws s3 ls s3://autoware-files/collected_data/2022-08-22_leo_drive_isuzu_bags/ --no-sign-request
PRE all-sensors-bag1_compressed/
PRE all-sensors-bag2_compressed/
PRE all-sensors-bag3_compressed/
PRE all-sensors-bag4_compressed/
PRE all-sensors-bag5_compressed/
PRE all-sensors-bag6_compressed/
PRE driving_20_kmh_2022_06_10-16_01_55_compressed/
PRE driving_30_kmh_2022_06_10-15_47_42_compressed/
# Then you can download a single bag file with the following:
aws s3 sync s3://autoware-files/collected_data/2022-08-22_leo_drive_isuzu_bags/all-sensors-bag1_compressed/ ./all-sensors-bag1_compressed --no-sign-request
AutoCore.ai - 激光雷达 ROS 2 袋锉和 pcap#
该数据集包含来自 Ouster OS1-64 激光雷达的 pcap 文件和 ros2 bag 文件. pcap 文件和 ros2 bag 文件是在同一时间录制的,持续时间略有不同.