从 TIER IV 的 CalibrationTools 开始#
概述#
Autoware 希望将多个传感器连接到车辆作为感知的输入,定位(Localization)和规划堆栈.
这些传感器必须正确校准,并且它们的位置必须在 sensor_kit_description 和 individual_params 包中定义.
在本教程中,我们将使用 TIER IV 的 CalibrationTools 存储库进行校准.
设置相对于 base_link sensor_kit_base_link 位置#
在上一节(创建车辆和传感器模型)中,我们提到了 sensors_calibration.yaml.
此文件存储 sensor_kit_base_link (子框架) 相对于base_link (父帧).
我们需要更新这个相对位置(创建 File 时,所有值最初都设置为零)使用我们车辆的 CAD 数据.
因此,我们 tutorial_vehicle 的 sensors_calibration.yaml 文件应该如下所示:
base_link:
sensor_kit_base_link:
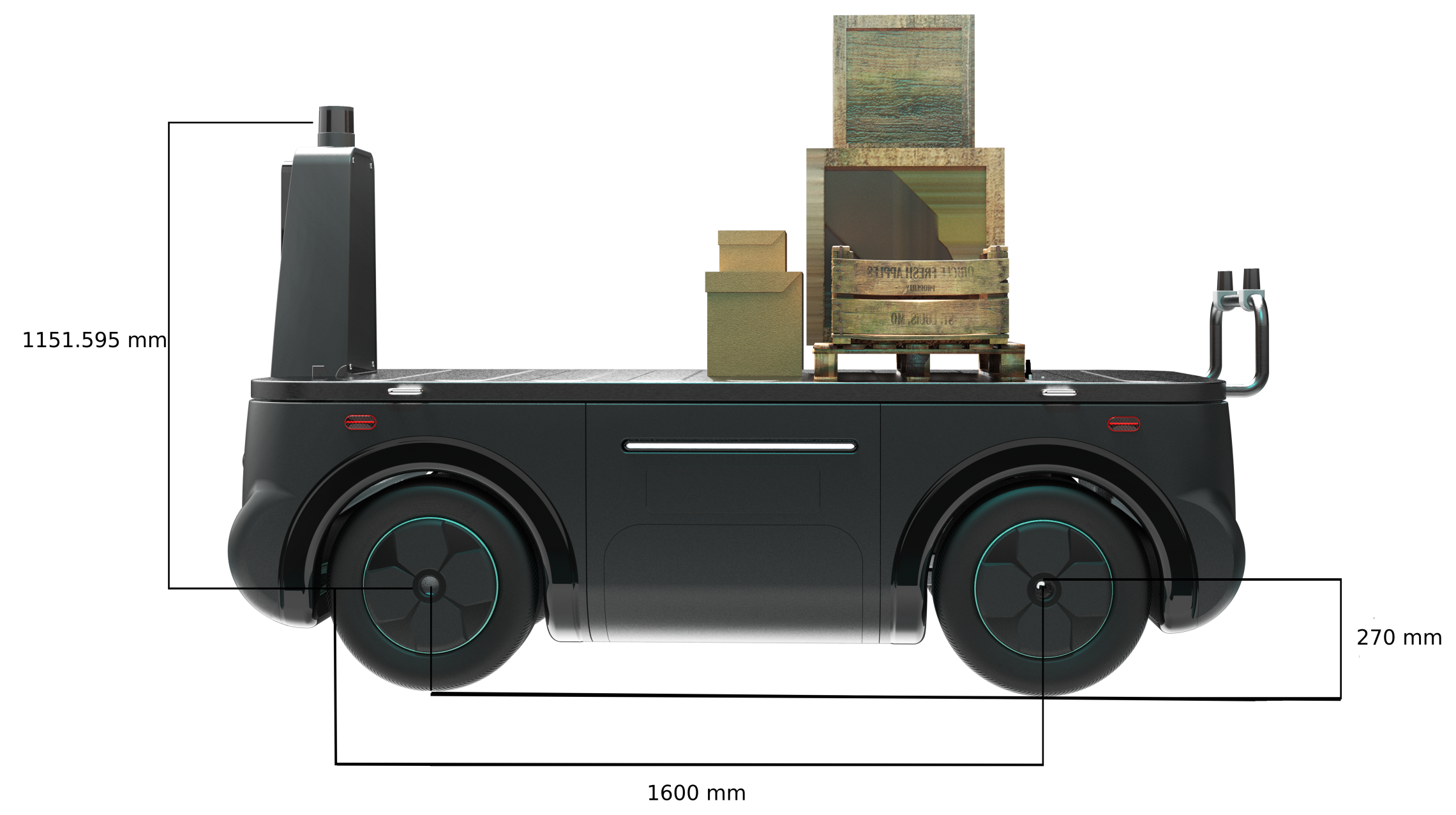
x: 1.600000 # 米
y: 0.0
z: 1.421595 # 1.151595m + 0.270m
roll: 0.0
pitch: 0.0
yaw: 0.0
您需要根据 sensor_kit_base_link 帧更新此变换值.
您还可以在 sensor_kit_calibration.yaml 文件中使用 GNSS/INS 和 IMU 位置的 CAD 值.
(请不要忘记更新 sensor_kit_calibration 和 sensor_kit_launch 和 individual_params 包中的 .yaml 文件)
在 autoware 上安装 TIER IV 的 CalibrationTools 存储库#
完成前面的步骤, 创建自己的自动软件、选择您的缩减采样点云
首先,我们将在自己的自动软件中克隆 CalibrationTools 存储库.
cd <YOUR-OWN-AUTOWARE-DIRECTORY> # for example: cd autoware.tutorial_vehicle
wget https://raw.githubusercontent.com/tier4/CalibrationTools/tier4/universe/calibration_tools_autoware.repos
vcs import src < calibration_tools_autoware.repos
rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
然后构建 all 软件包,在对传感器型号和车辆型号进行所有必要的更改后.
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
CalibrationTools 的使用#
CalibrationTools 存储库包含多个软件包
用于校准不同的传感器对,例如 LiDAR - LiDAR,
相机-激光雷达、地面-激光雷达等.为了校准我们的传感器,
我们将修改传感器套件的 extrinsic_calibration_package .
对于 tutorial_vehicle ,创建以下教程部分时完成的启动文件可在 tutorial_vehicle_sensor_kit 找到.