减速带#
行为速度规划器的 速度碰撞模块 规划速度 在减速带前减速,以实现舒适和安全的驾驶. 为了作它,我们将在 lanelet2 地图中添加减速带.
创建速度碰撞元素#
为了在您的点云地图上创建减速带,请按照以下步骤作:
- 从 Lanelet2Maps 部分选择
Linestring. - 单击并绘制用于减速带的多边形.
- 然后请从 Lanelet2Maps 部分禁用
Linestring. - 从
Action面板点击Change to Polygon. - 请选择此多边形并输入
speed_bump作为类型. - 然后,请点击要添加的减速带的 lanelet.
- 选择
创建一般监管 ELement. - 转到此元素,请输入
speed_bump作为子类型. - 单击
添加引用并键入您创建的减速带多边形 ID.
您可以在减速带创建演示视频中看到以下步骤:
测试创建了带有规划模拟器的减速带元素#
完成地图创建后,我们需要保存它.
为此,请单击 文件 --> 导出 Lanelet2Maps ,然后下载.
下载完成后, 我们需要将 lanelet2 map 和 pointcloud map 放在同一个位置. 目录结构应如下所示:
+ <YOUR-MAP-DIRECTORY>/
+ ├─ pointcloud_map.pcd
+ └─ lanelet2_map.osm
如果您的 .osm 或 .pcd 映射文件的名称与这些名称不同,则 您需要更新 autoware.launch.xml:
<!-- Map -->
- <arg name="lanelet2_map_file" default="lanelet2_map.osm" description="lanelet2 map file name"/>
+ <arg name="lanelet2_map_file" default="<YOUR-LANELET-MAP-NAME>.osm" description="lanelet2 map file name"/>
- <arg name="pointcloud_map_file" default="pointcloud_map.pcd" description="pointcloud map file name"/>
+ <arg name="pointcloud_map_file" default="<YOUR-POINTCLOUD-MAP-NAME>.pcd" description="pointcloud map file name"/>
注意
默认情况下,速度碰撞模块未启用.要启用它,请在 behavior_velocity_planner.param.yaml 中取消注释.
现在我们准备启动规划模拟器:
ros2 launch autoware_launch planning_simulator.launch.xml map_path:=<YOUR-MAP-FOLDER-DIR> vehicle_model:=<YOUR-VEHICLE-MODEL> sensor_model:=<YOUR-SENSOR-KIT>
tutorial_vehicle示例:
ros2 launch autoware_launch planning_simulator.launch.xml map_path:=$HOME/Files/autoware_map/tutorial_map/ vehicle_model:=tutorial_vehicle sensor_model:=tutorial_vehicle_sensor_kit vehicle_id:=tutorial_vehicle
- 单击 rviz 上的
2D Pose Estimate按钮或按P并给出初始化姿势. - 点击 rviz 上的
2D 目标姿势按钮或按G并给出目标点的姿势. - 您可以在 rviz 屏幕上看到减速带标记.
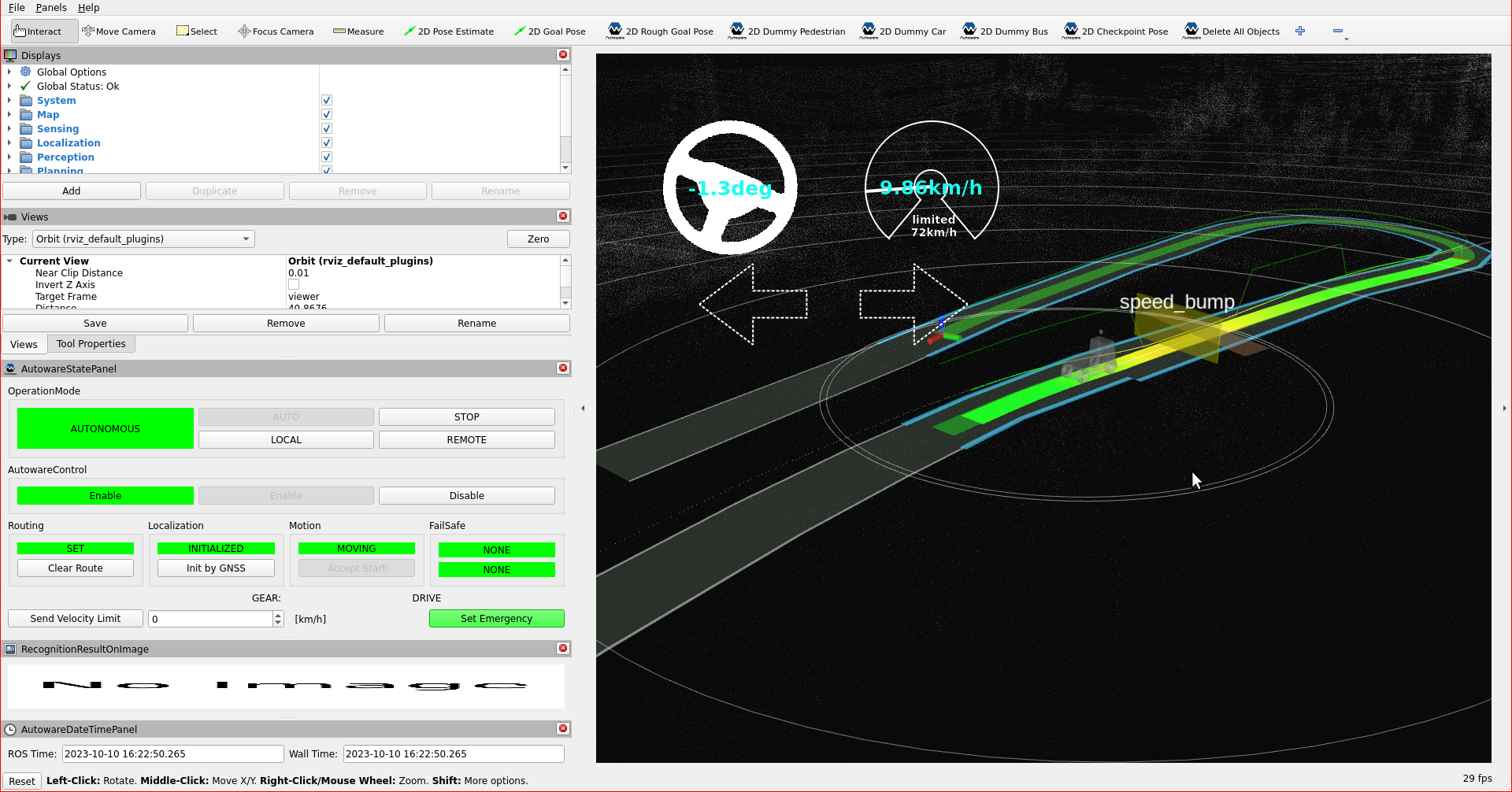
rviz 上的减速带标记:
您可以在规划模拟器中检查您的减速带元素,如以下演示视频所示: