IA-LIO-SAM#
什么是 IA-LIO-SAM?#
- IA_LIO_SLAM 是为在非结构化环境中采集数据而创建的,它是一个通过平滑和映射实现强度和环境增强激光雷达惯性里程计的框架,可实现高精度的机器人轨迹和映射.
存储库信息#
原始仓库 link#
https://github.com/minwoo0611/IA_LIO_SAM
必需的传感器#
- LIDAR [Velodyne, Ouster]
- IMU [9-AXIS]
- GNSS
ROS 兼容性#
- ROS 1
依赖#
-
ROS (使用 Kinetic 和 Melodic 测试)
-
for ROS melodic:sudo apt-get install -y ros-melodic-navigation sudo apt-get install -y ros-melodic-robot-localization sudo apt-get install -y ros-melodic-robot-state-publisher
-
for ROS kinetic:sudo apt-get install -y ros-kinetic-navigation sudo apt-get install -y ros-kinetic-robot-localization sudo apt-get install -y ros-kinetic-robot-state-publisher
-
-
GTSAM (Georgia Tech Smoothing and Mapping 库)
wget -O ~/Downloads/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.2.zip cd ~/Downloads/ && unzip gtsam.zip -d ~/Downloads/ cd ~/Downloads/gtsam-4.0.2/ mkdir build && cd build cmake -DGTSAM_BUILD_WITH_MARCH_NATIVE=OFF .. sudo make install -j8
构建并运行#
1) 构建#
mkdir -p ~/catkin_ia_lio/src
cd ~/catkin_ia_lio/src
git clone https://github.com/minwoo0611/IA_LIO_SAM
cd ..
catkin_make
2) 设置参数#
- 下载仓库后,更改配置文件 (
workspace/src/IA_LIO_SAM/config/params.yaml) 上的主题和传感器设置
- 为了实现 imu-lidar 兼容性,必须更改校准中的外在矩阵.
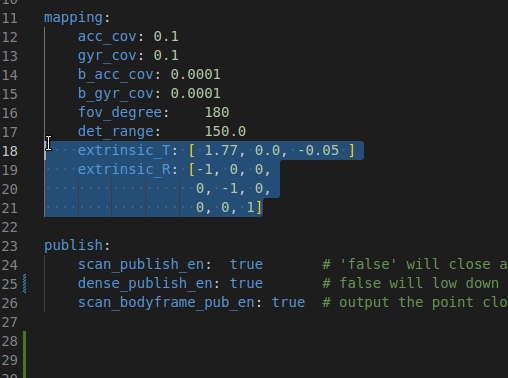
- 要启用自动保存,
params.yaml文件(workspace/src/IA_LIO_SAM/config/params.yaml)上的savePCD必须为true.
3) 运行#
# 打开新终端:运行 IA_LIO
source devel/setup.bash
roslaunch lio_sam mapping_ouster64.launch
# 在另一个终端中播放 bag 文件
rosbag play RECORDED_BAG.bag --clock
示例数据集图像#
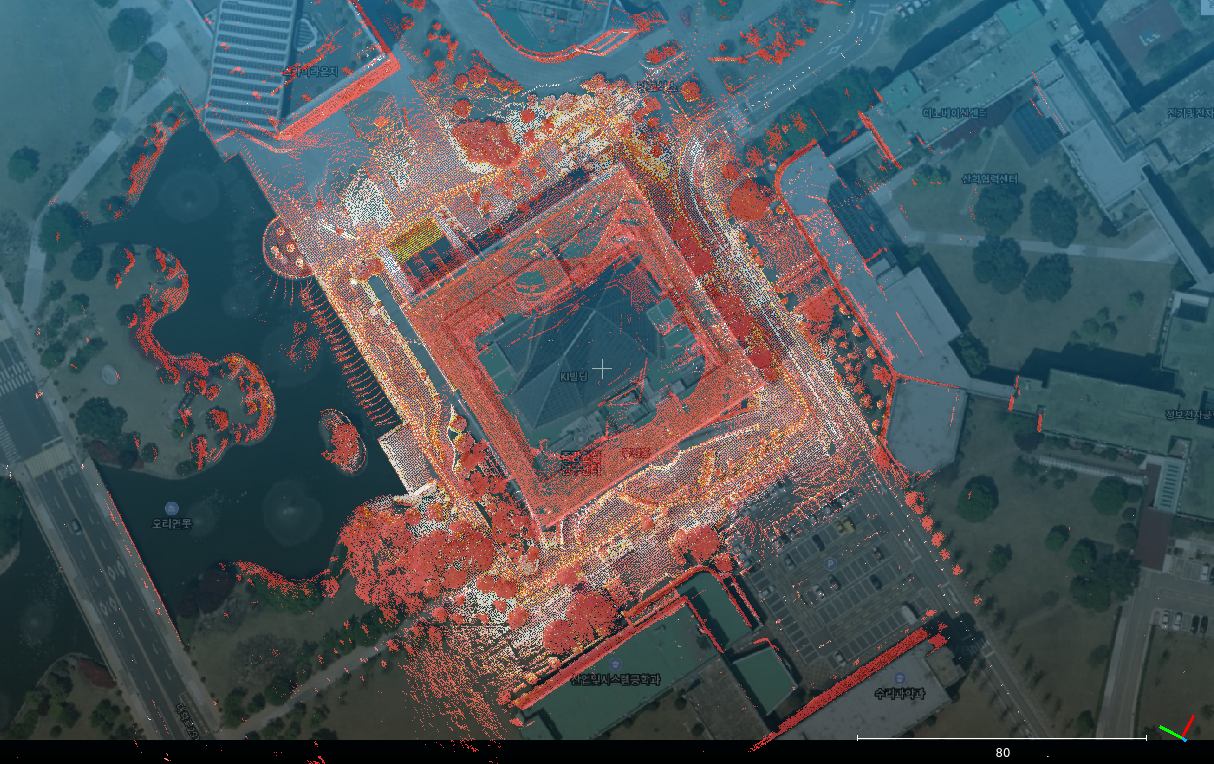
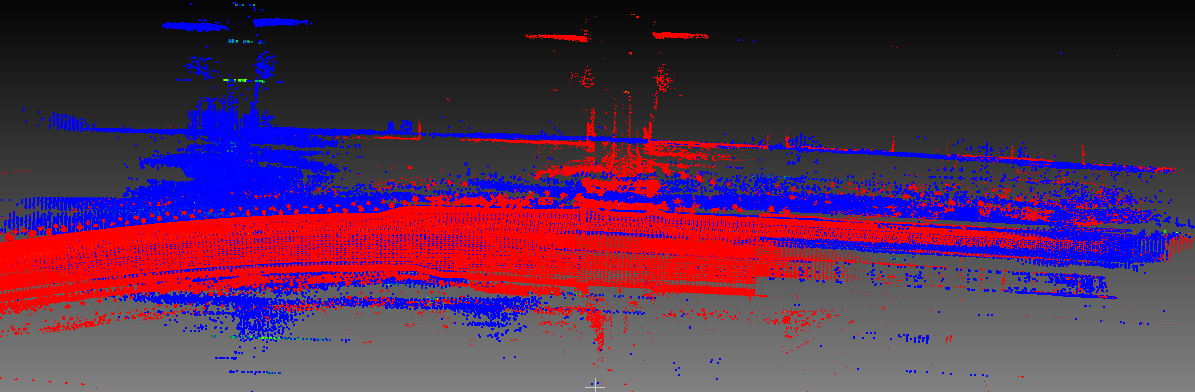

示例数据集#
检查原始 repo 链接以获取示例 dataset.
联系#
- Maintainer: Kevin Jung (
GitHub: minwoo0611)
纸#
感谢您引用 IA-LIO-SAM(./config/doc/KRS-2021-17.pdf) (如果您使用此代码中的任何一个).
部分代码改编自 LIO-SAM (IROS-2020).
@inproceedings{legoloam2018shan,
title={LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain},
author={Shan, Tixiao and Englot, Brendan},
booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={4758-4765},
year={2018},
organization={IEEE}
}
确认#
- IA-LIO-SAM 基于 LIO-SAM (T. Shan, B. Englot, D. Meyers, W. Wang, C. Ratti, and D. Rus. LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping).