ISCLOAM#
什么是 ISCLOAM?#
- ISCLOAM 通过集成几何和强度信息,提供了一种强大的闭环检测方法.
存储库信息#
原始仓库 link#
https://github.com/wh200720041/iscloam
必需的传感器#
- LIDAR [Velodyne]
ROS 兼容性#
- ROS 1
依赖#
- Ubuntu 64-bit 18.04
- ROS Melodic ROS Installation
- Ceres Solver Ceres Installation
- PCL PCL Installation
- Gtsam GTSAM Installation
- OpenCV OPENCV Installation
- Trajectory visualization
为了可视化,此软件包使用 hector trajectory sever,您可以通过以下方式安装软件包
sudo apt-get install ros-melodic-hector-trajectory-server
构建并运行#
1. 克隆存储库#
cd ~/catkin_ws/src
git clone https://github.com/wh200720041/iscloam.git
cd ..
catkin_make -j1
source ~/catkin_ws/devel/setup.bash
2. 设置参数#
更改启动文件上的 bag 位置和传感器参数.

3. 启动#
roslaunch iscloam iscloam.launch
如果要同时生成 Environment 的 Map,可以运行
roslaunch iscloam iscloam_mapping.launch
请注意,全局 map 可能非常大,因此执行全局优化可能需要一段时间,由于 trajectory 和 map 在单独的线程中运行,因此预计它们之间会有一些滞后.当识别出循环闭路时,将发生更多的 CPU 使用率.
示例结果#
观看演示视频视频链接
Ground Truth 比较#
绿色:ISCLOAM红色:真值
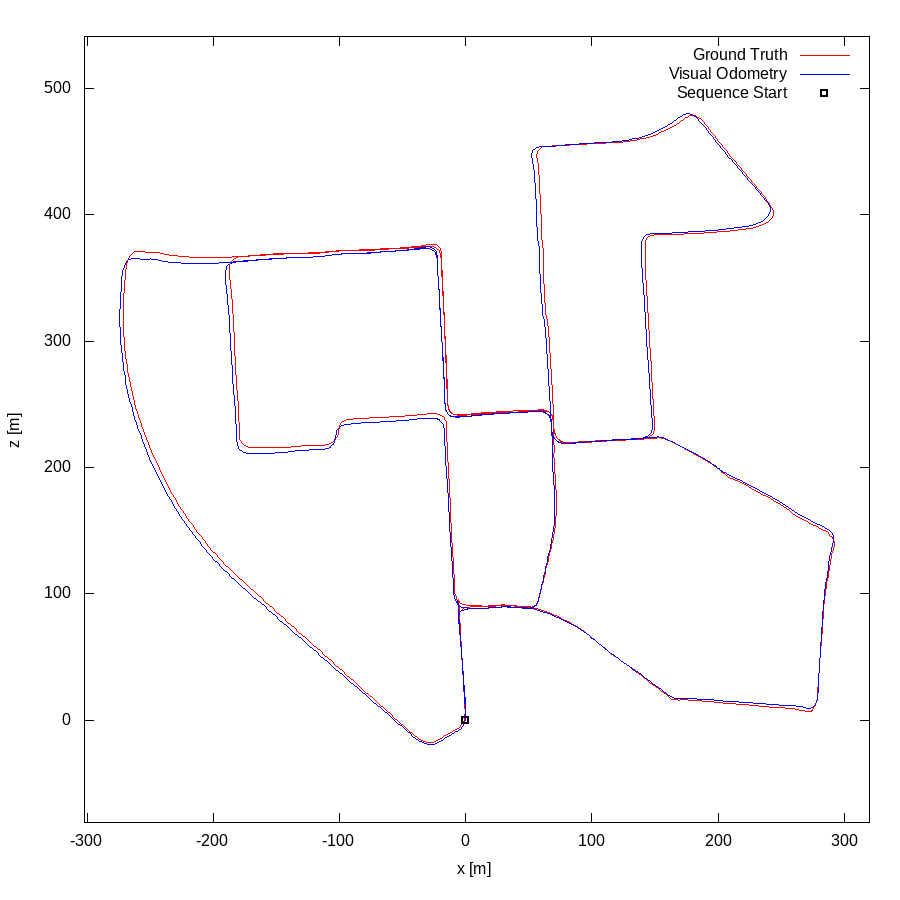
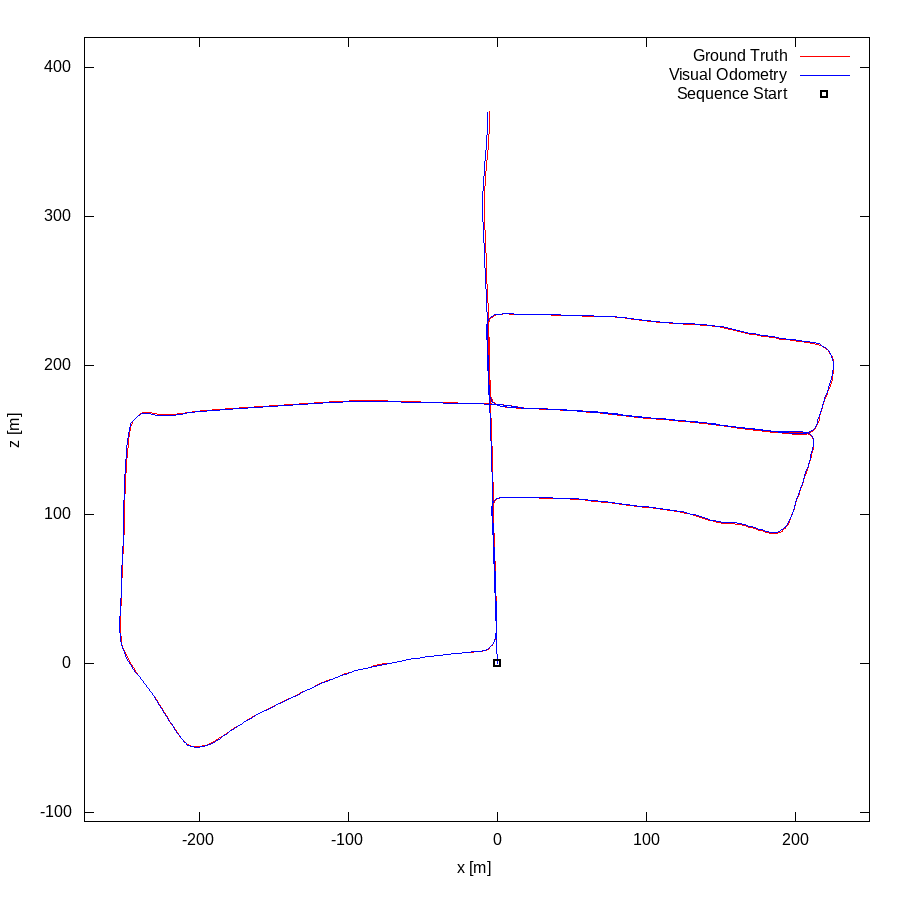
KITTI sequence 00 KITTI sequence 05
报价单#
如果你把这篇作品用于你的研究,你可能想引用下面的论文,你的引用将不胜感激
@inproceedings{wang2020intensity,
author={H. {Wang} and C. {Wang} and L. {Xie}},
booktitle={2020 IEEE International Conference on Robotics and Automation (ICRA)},
title={Intensity Scan Context: Coding Intensity and Geometry Relations for Loop Closure Detection},
year={2020},
volume={},
number={},
pages={2095-2101},
doi={10.1109/ICRA40945.2020.9196764}
}
确认#
感谢 A-LOAM 和 LOAM(J. Zhang 和 S. Singh.LOAM:激光雷达里程计和实时测绘)和 LOAM_NOTED.
作者: 王晗, 新加坡南洋理工大学