创建地图#
Autoware 需要车辆作环境的点云地图和矢量地图.(查看 地图设计文档页面 获取详细规范).
本页介绍了用户如何创建可用于 Autoware 的地图.
创建点云地图#
传统上,使用移动扫描系统 (MMS) 来创建高精度的大规模点云地图.然而,由于 MMS 需要高端传感器进行精确定位,因此其运营成本可能非常昂贵,并且可能不适合相对较小的驾驶环境.或者,可以使用同步定位和地图构建 (SLAM) 算法从记录的 LiDAR 扫描中创建点云地图.此 页面 中列出了一些有用的开源 SLAM 实现.
如果您更喜欢易于使用的专有软件,您可以尝试 [MAP IV, Inc.] 的全自动地图绘制工具(https://www.map4.jp/),MapIV Engine.他们目前为 Autoware 用户免费提供试用许可证.
创建矢量地图#
创建简单地图的快速方法#
bag2lanelet 是一种从自定位数据创建虚拟车道的工具.无论是在真实环境中还是在模拟环境中,您都可以使用此工具从 rosbag 生成带有自身位置信息的简单 lanelet,从而快速测试 Autoware 的性能.该工具的一个关键用例是在最初手动驾驶的路线上模拟自动驾驶.
但是,需要注意的是,该工具的功能非常有限,并且只能生成单车道地图.要启用更全面的地图和导航功能,我们建议使用下一节中描述的 Vector Map Builder .
用于创建矢量地图的工具#
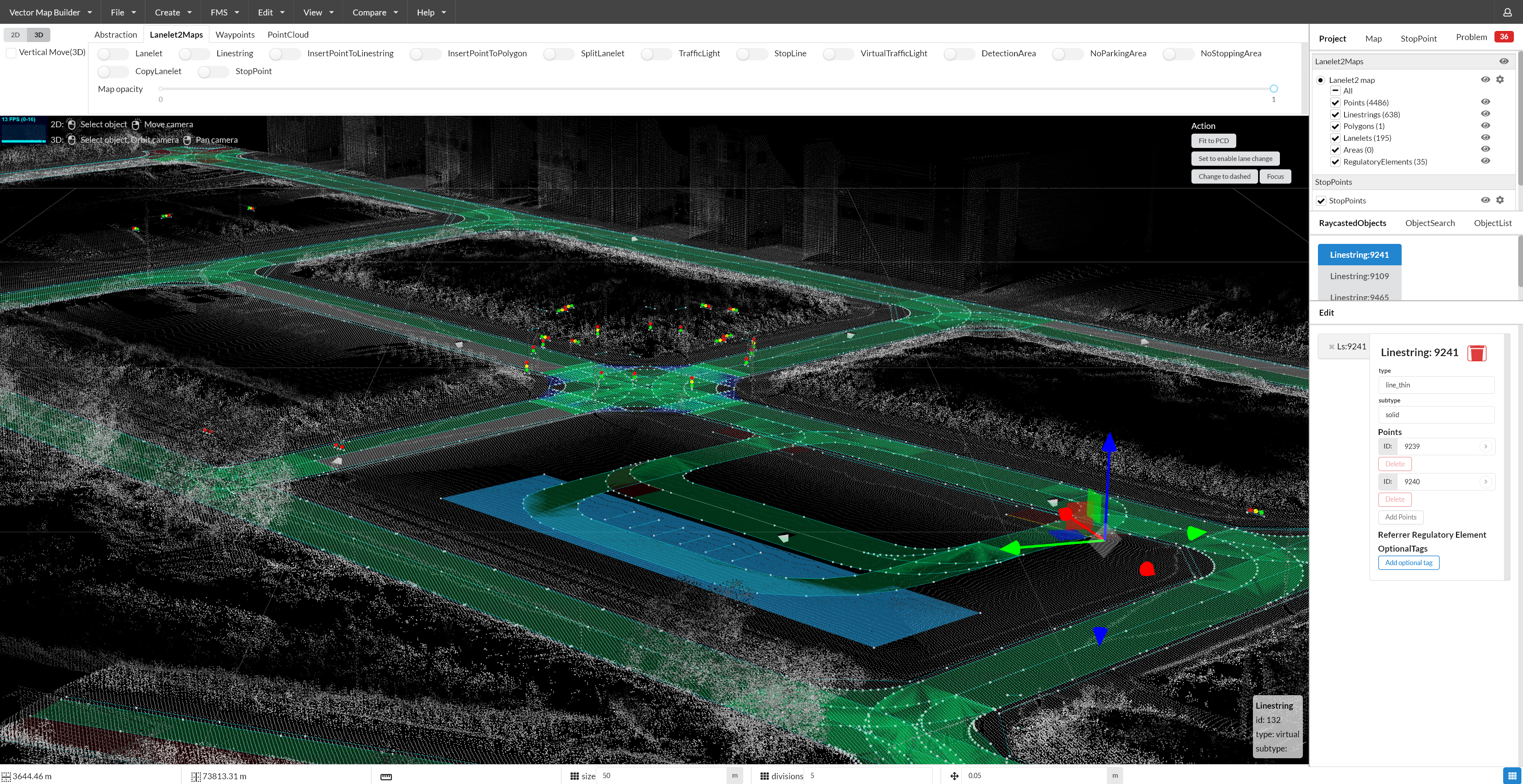
创建与 Autoware 兼容的矢量地图的推荐方法是使用 Vector Map Builder,这是 [TIER IV, Inc.] 提供的基于 Web 的免费工具.(https://www.tier4.jp/). Vector Map Builder 允许您使用点云地图作为参考来创建车道并添加其他监管元素,例如停车标志或交通信号灯.
对于开源软件选项,MapToolbox 是 Unity 的插件,专门用于为 Autoware 创建 Lanelet2 地图. 虽然 JOSM 是另一个可用于创建 Lanelet2 地图的开源工具,但请注意,必须手动完成一些修改才能使地图与 Autoware 兼容.这个过程可能既乏味又耗时,因此不建议使用 JOSM.
与 Autoware 兼容的地图提供程序#
如果无法自行创建高精地图,则可以改用以下与 Autoware 兼容的地图提供商提供的地图服务:
下表显示了每家公司的地图绘制技术及其支持的高清地图类型.
| 公司 | 建图技术 | 可用地图 |
|---|---|---|
| MAP IV, Inc. | SLAM | 点云和矢量贴图 |
| AISAN TECHNOLOGY CO., LTD. | MMS | 点云和矢量贴图 |
| TomTom | MMS | Vector map* |
注意
TomTom 提供的地图使用其专有的 AutoStream 格式,而不是 Lanelet2. 开源的 AutoStreamForAutoware 工具 可用于将 AutoStream 地图转换为 Lanelet2 地图. 但是,该转换器仍处于早期阶段,并且存在一些 已知限制.