源代码安装#
先决条件#
-
操作系统
-
ROS
- ROS 2 Humble
有关 ROS 2 系统依赖项,请参阅 REP-2000.
- Git
- Registering SSH keys to GitHub is preferable.
- 将 SSH 密钥注册到 GitHub 是首选.
sudo apt-get -y update
sudo apt-get -y install git
注意:如果您希望在 Ubuntu 20.04 上使用 ROS 2 Galactic,请参考 galactic 分支的安装说明,但请注意 Galactic 版本的 Autoware 可能没有最新的功能.
如何设置开发环境#
-
克隆
autowarefoundation/autoware并移动到该目录.git clone https://github.com/autowarefoundation/autoware.git cd autoware -
如果您是第一次安装 Autoware,则可以使用提供的 Ansible 脚本自动安装依赖项.
./setup-dev-env.sh如果您遇到任何构建问题,请咨询 故障排除 部分寻求帮助.
注意
将自动安装以下项目.如果 ansible 脚本不起作用,或者您已经安装了不同版本的依赖库,请手动安装以下项目.
- Install Ansible
- Install Build Tools
- Install Dev Tools
- Install gdown
- Install geographiclib
- Install pacmod
- Install the RMW Implementation
- Install ROS 2
- Install ROS 2 Dev Tools
- Install Nvidia CUDA
- Install Nvidia cuDNN and TensorRT
- Install the Autoware RViz Theme (only affects Autoware RViz)
- Download the Artifacts (for perception inference)
如何设置工作区#
如果您更喜欢使用图形用户界面 (GUI) 而不是命令行来启动和管理仿真,请参阅本文档末尾的 使用 Autoware Build GUI 部分以获取分步指南.
-
创建
src目录并将存储库克隆到其中.Autoware 使用 vcstool 来构建工作区.
cd autoware mkdir src vcs import src < autoware.repos如果您是一名活跃的开发人员,您可能还希望提取包含最新更新的 nightly 存储库:
vcs import src < autoware-nightly.repos⚠️ 注意:nightly 仓库不稳定,可能包含 bug.请谨慎使用它们.
或者,您还可以下载包含特定硬件驱动程序的额外存储库,但它们不是构建和运行 Autoware 所必需的:
vcs import src < extra-packages.repos -
安装依赖的 ROS 包.
除了核心组件之外,Autoware 还需要一些 ROS 2 软件包. 工具
rosdep允许自动搜索和安装此类依赖项. 您可能需要先运行rosdep update,然后再运行rosdep install.source /opt/ros/humble/setup.bash # Make sure all previously installed ros-$ROS_DISTRO-* packages are upgraded to their latest version sudo apt update && sudo apt upgrade rosdep update rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO -
安装并设置 ccache 以加快连续构建速度.(可选,但强烈推荐)
-
构建工作区.
Autoware 使用 colcon 来构建工作区. 有关更高级的选项,请参阅 documentation.
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release如果存在任何构建问题,请参阅 故障排除中.
-
按照 网络配置,然后再运行 Autoware.
-
应用 [ROS 2 的控制台设置] 中推荐的设置(../../installation/additional-settings-for-developers/console-settings.md) 以获得更好的开发体验.(可选)
如何更新工作区#
-
更新
.repos文件.cd autoware git pull <remote> <your branch><remote>通常为git@github.com:autowarefoundation/autoware.git -
更新存储库.
vcs import src < autoware.repos如果您使用的是 nightly 存储库,则还可以更新它们.
vcs import src < autoware-nightly.reposvcs pull src对于 Git 用户:
vcs importis similar togit checkout.- 请注意,它不会从远程拉取.
vcs pullis similar togit pull.- 请注意,它不会切换分支.
有关更多信息,请参阅 官方文档.
可能是通过
vcs import导入的依赖项已被移动/删除. VCStool 目前不处理这些情况,因此如果在vcs import后构建失败,请清理 并且可能需要重新导入所有依赖项:rm -rf src/* vcs import src < autoware.repos如果您使用的是 nightly 仓库,也请导入它们.
vcs import src < autoware-nightly.repos -
安装依赖的 ROS 软件包.
source /opt/ros/humble/setup.bash # Make sure all previously installed ros-$ROS_DISTRO-* packages are upgraded to their latest version sudo apt update && sudo apt upgrade rosdep update rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO -
构建工作区.
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
使用 Autoware Build GUI#
除了构建 Autoware 包的传统命令行方法外,开发人员和用户还可以利用 Autoware Build GUI 获得更简化和用户友好的体验.此 GUI 应用程序简化了构建和管理 Autoware 包的过程.
与 Autoware 源安装集成#
将 Autoware Build GUI 与传统源代码安装过程结合使用时:
- 初始设置:按照标准的 Autoware 源安装指南设置您的环境和工作区.
- 使用 GUI:初始设置完成后,您可以使用 Autoware Build GUI 来管理后续构建和软件包更新.
此集成提供了一种更易于访问的方法来构建和管理 Autoware 包,从而满足新用户和经验丰富的开发人员的需求.
Autoware Build GUI 入门#
-
安装: 确保您已安装 Autoware Build GUI. 安装说明.
-
启动应用程序: 安装后,启动 Autoware Build GUI.

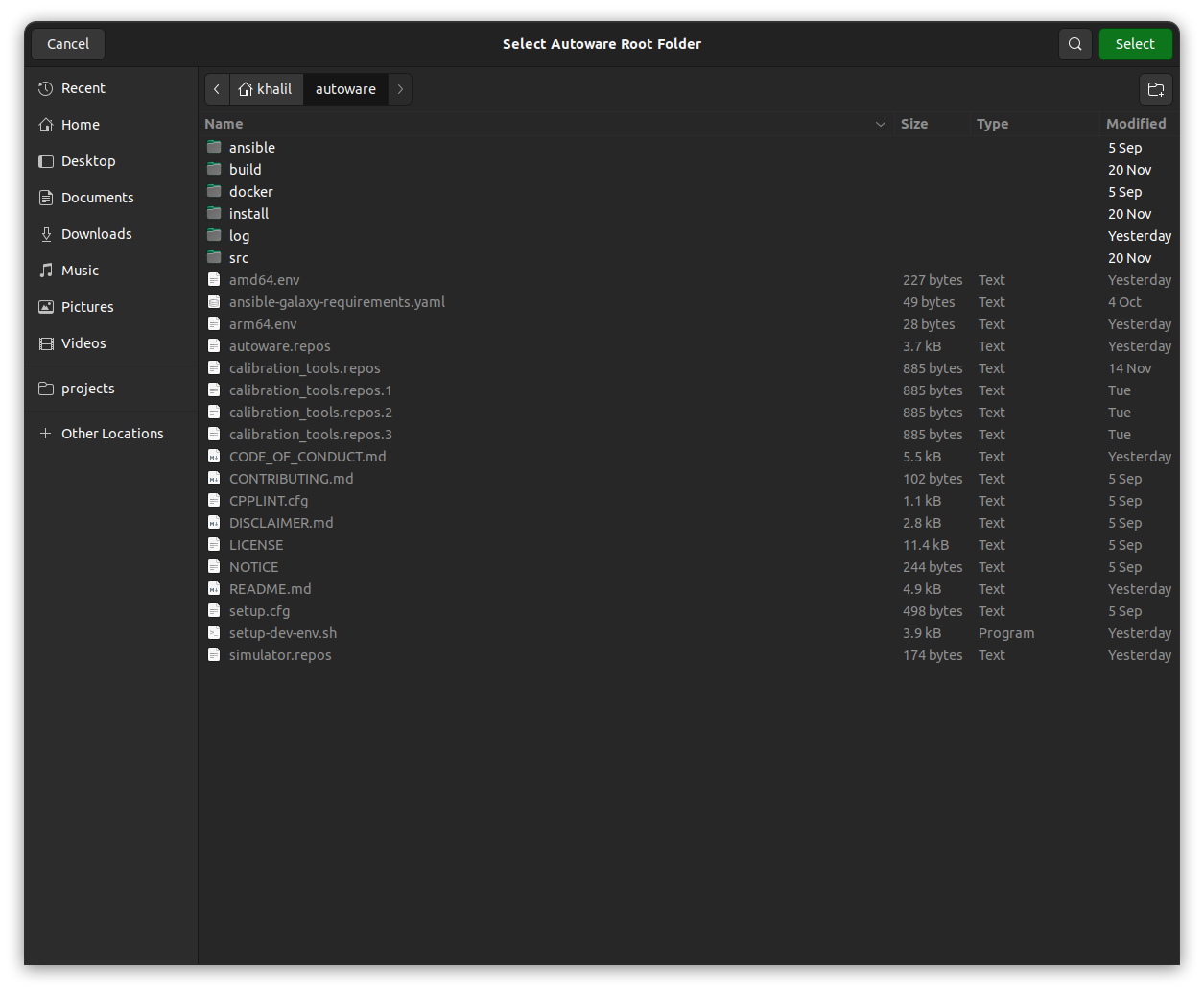
-
设置: 在 GUI 中设置 Autoware 文件夹的路径.
-
构建包: 选择要构建的 Autoware 包,并通过 GUI 管理构建过程.

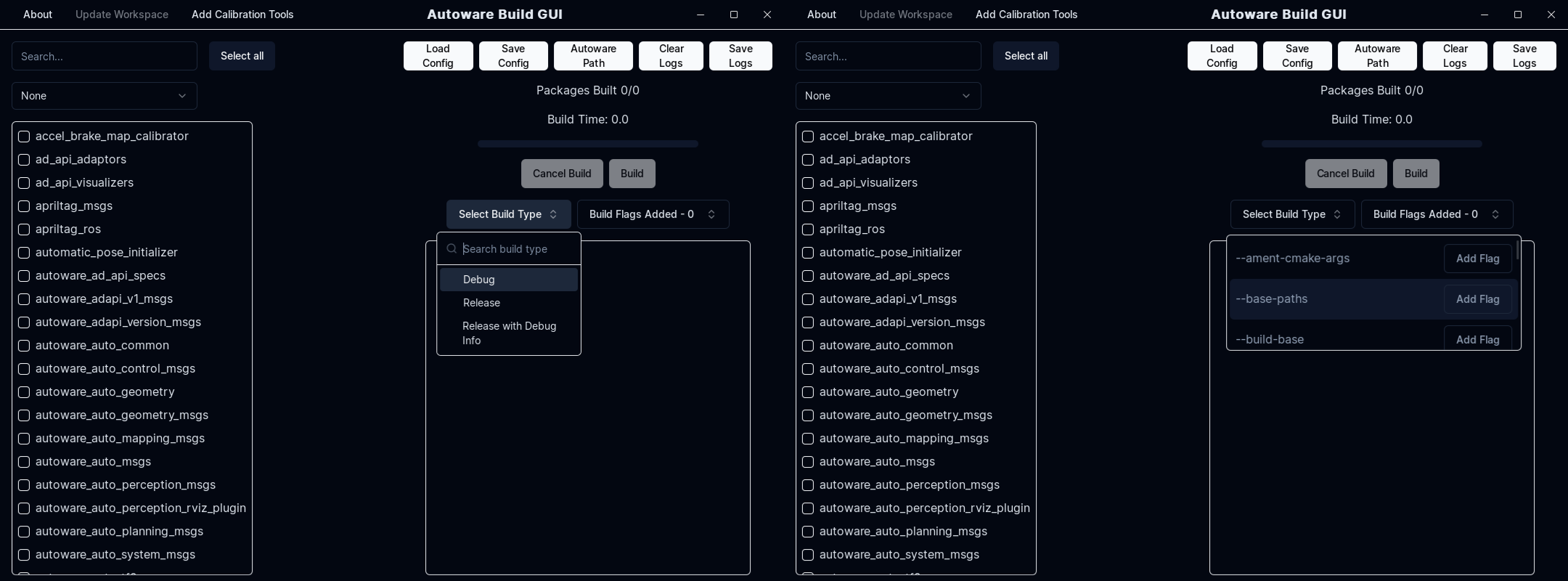
4.1. 构建配置: 从默认构建配置列表中进行选择,或选择要手动构建的软件包.
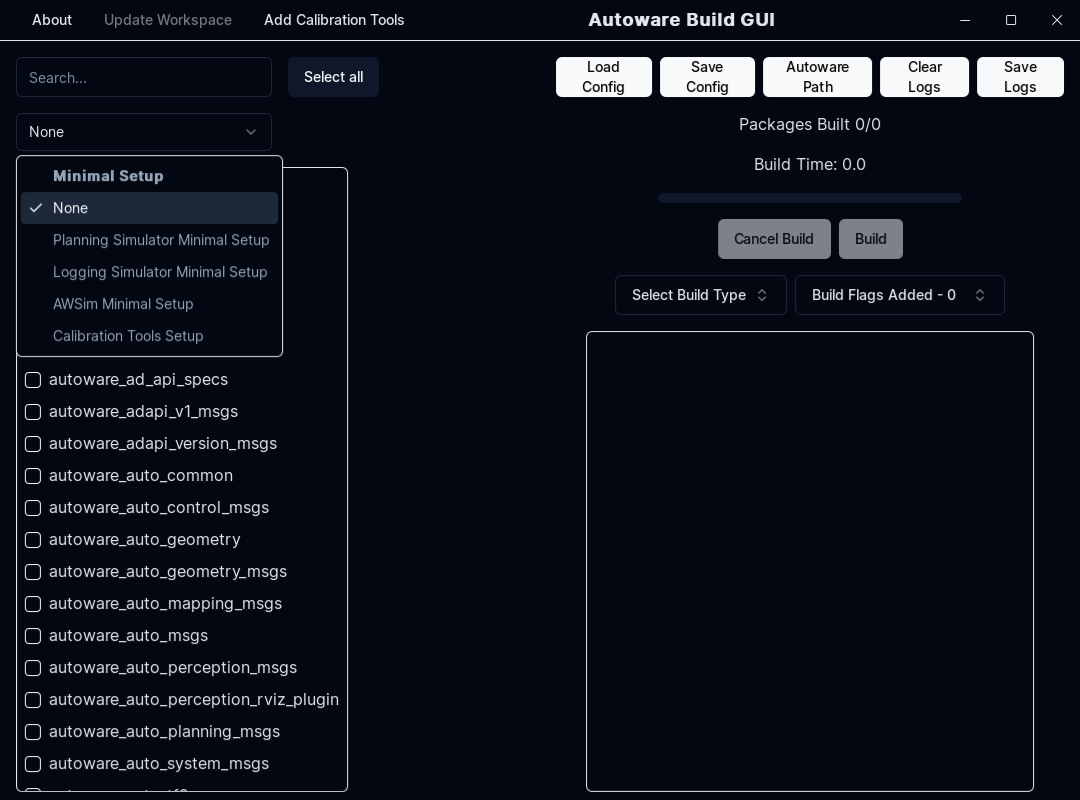
4.2. 构建选项: 选择您要使用的构建类型,并能够指定其他构建选项.
-
保存和加载: 保存您的构建配置以备将来使用,或者如果您不想构建所有包或使用提供的默认配置之一,请加载以前保存的配置.
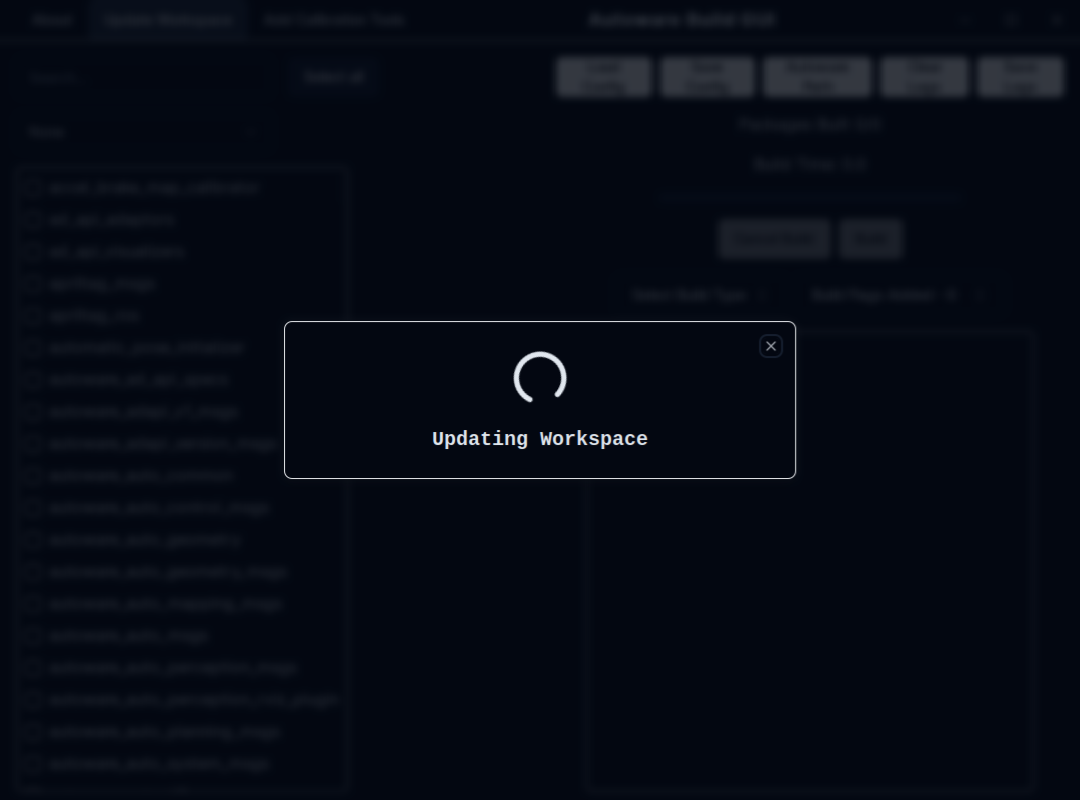
-
更新工作区: 使用 GUI 将 Autoware 工作区的软件包更新到最新版本,或将校准工具添加到工作区.