减少实车的启动延迟#
在模拟中,自我车辆几乎会立即对 Autoware 生成的控制命令做出反应. 然而,对于真实的车辆,会发生一些延误,这可能会使自我感觉反应迟钝.
本页介绍在真实车辆上使用 Autoware 时遇到的启动延迟. 我们将启动延迟定义为 (a) 当 Autoware 决定启动 ego 车辆时,以及 (b) 当车辆实际开始移动时. 更准确地说:
- (a) 是 Autoware 输出的速度或加速度命令切换为非零值的时间.
- (b) 是 ego 车辆的测得速度变为正值的时间.
手动驾驶的启动延迟#
首先,让我们看看人类驾驶时的启动延迟.
下图显示了人类驾驶员换档时的启动延迟 从 parked 到 drive 并立即松开制动器以推动油门踏板并使车辆的速度增加.
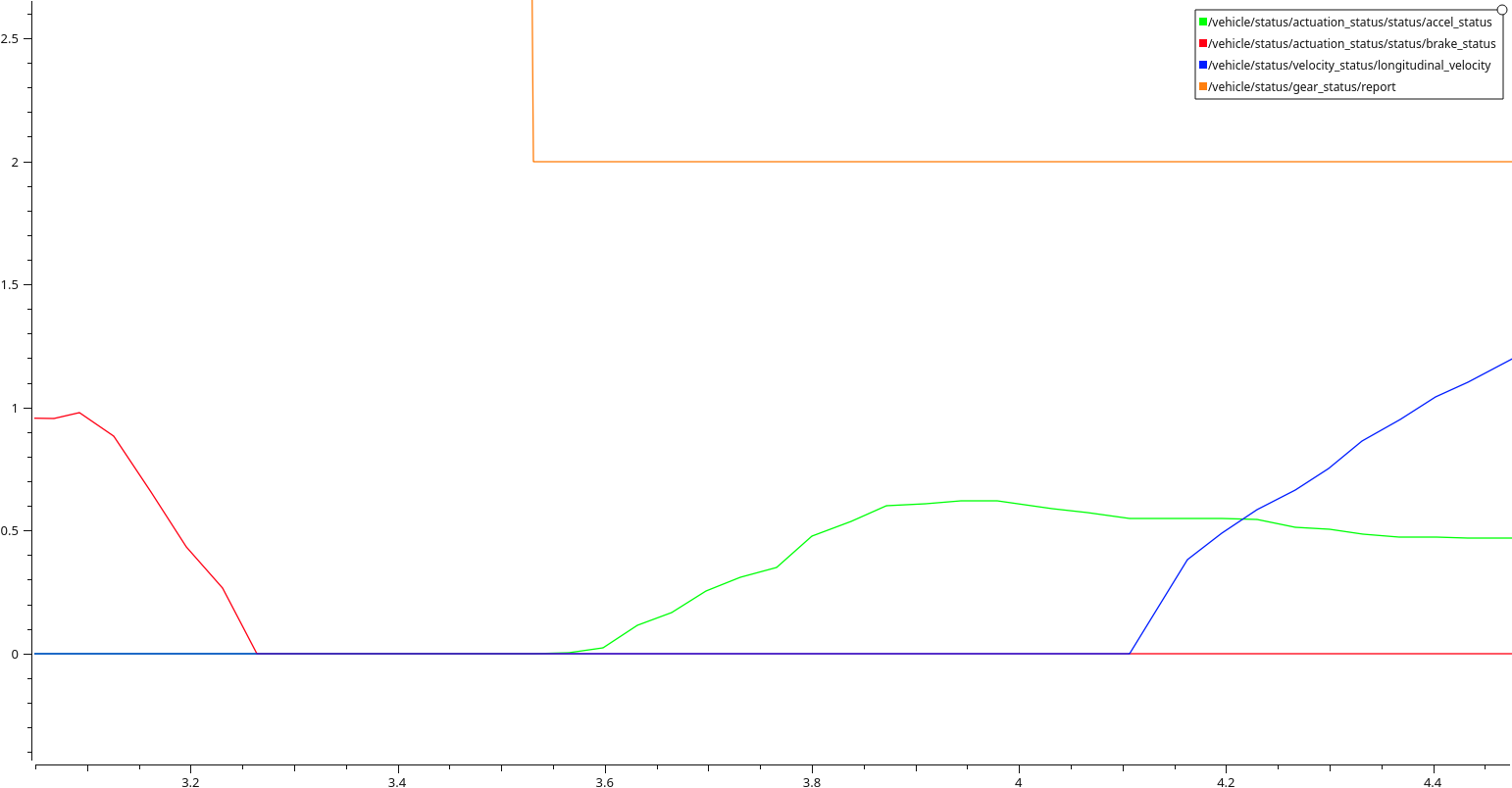
从这个图中可以注意很多事情.
- 刹车(红色):尽管驾驶员立即松开刹车踏板,
我们看到测得的制动大约需要
150ms从100%到0%. - 档位(橙色):驾驶员在松开制动踏板之前换档,但测量档位以 之后 制动器被释放.
- 油门(绿色)和速度(蓝色):驾驶员踩下油门踏板,测量车辆在大约
500 毫秒后开始移动.
Filter delay (滤波器延迟)#
为了保证乘客的舒适度, 一些 Autoware 模块在车辆的加加速度上实施过滤器,以防止加速的突然变化.
例如
vehicle_cmd_gate
过滤控制器生成的加速命令
以及 之前引入了重大延误
在加速度为负的 stop 命令之间转换时,
以及加速度为正的 move 命令.
由于加加速度滤波器,负值和正值之间的转换不是瞬间的,需要几百毫秒.
齿轮延迟#
在许多车辆中,在首次开始移动车辆之前有必要换档. 当自动执行时,此换档可能需要一些时间. 此外,从手动驾驶记录的数据可以看出,测得的档位值可能会延迟.
在 Autoware 中,控制器会发送停止控制命令,直到齿轮变为 drive 状态. 这意味着换档延迟及其报告值会极大地影响起动延迟. 请注意,仅当车辆最初处于 parked 档位时,这才是一个问题.
减少这种延迟的唯一方法是调整车辆以提高换档速度 或减少换档报告中的延迟.
制动延迟#
在带有制动踏板的车辆中, 制动系统通常由几个无法立即移动的运动部件组成. 因此,当 Autoware 向车辆发送制动命令时, 在应用于车轮的实际制动器中应该会有一些延迟.
这种挥之不去的刹车可能会阻止或延迟自我车辆的初始运动.
可以通过调整无人机来减少这种延迟.
节流响应#
对于带油门控制的车辆, 启动延迟的主要原因之一是由于 油门响应 的车辆. 踩下油门踏板时,车辆的车轮不会立即开始旋转. 这部分是由于车辆的惯性, 但也对电机,可能需要很长时间才能开始应用 车轮有一些扭矩.
可以调整一些 Vehicle Side 参数来减少这种延迟. 但这样做往往是以降低能源效率为代价的.
在 Autoware 方面,减少此延迟的唯一方法是增加初始限制 但这可能会导致令人不舒服的高初始加速度.
初始加速和节流#
正如我们刚刚讨论的,对于具有油门控制的车辆,增加初始油门值可以减少启动延迟.
由于 Autoware 会输出加速度值,因此 conversion 模块
raw_vehicle_cmd_converter
用于将 Autoware 的加速度值映射到要发送到车辆的油门值.
这种映射通常是使用
accel_brake_map_calibrator 模块,
但它可能会产生较低的初始节流,从而导致较高的启动延迟.
为了增加初始限制,有两个选项: 增加 Autoware 的初始加速度输出, 或修改 Acceleration to throttle 映射.
Autoware 输出的初始加速度可以在
motion_velocity_smoother
使用参数 engage_velocity 和 engage_acceleration .
但是,vehicle_cmd_gate
对 control 命令应用过滤器,以防止加加速度和加速度发生过突然的变化,
限制 EGO 车辆停止时允许的最大加速度.
或者,可以调整加速度映射以增加与初始加速度对应的油门.
如果我们看一个例子
加速地图、
它执行以下转换:
当 EGO Velocity 为 0 (第一列) 时,加速度值介于 0.631 (第一行) 和 0.836 (第二行) 之间
转换为介于 0% 和 10% 之间的限制.
这意味着任何低于 0.631m/s² 的初始加速度都不会产生任何节流.
请记住,在调整加速贴图后,
可能还需要更新
刹车图.
| default | 0 | 1.39 | 2.78 | 4.17 | 5.56 | 6.94 | 8.33 | 9.72 | 11.11 | 12.5 | 13.89 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 0.631 | 0.11 | -0.04 | -0.04 | -0.041 | -0.096 | -0.137 | -0.178 | -0.234 | -0.322 | -0.456 |
| 0.1 | 0.836 | 0.57 | 0.379 | 0.17 | 0.08 | 0.07 | 0.068 | 0.027 | -0.03 | -0.117 | -0.251 |
| 0.2 | 1.129 | 0.863 | 0.672 | 0.542 | 0.4 | 0.38 | 0.361 | 0.32 | 0.263 | 0.176 | 0.042 |
| 0.3 | 1.559 | 1.293 | 1.102 | 0.972 | 0.887 | 0.832 | 0.791 | 0.75 | 0.694 | 0.606 | 0.472 |
| 0.4 | 2.176 | 1.909 | 1.718 | 1.588 | 1.503 | 1.448 | 1.408 | 1.367 | 1.31 | 1.222 | 1.089 |
| 0.5 | 3.027 | 2.76 | 2.57 | 2.439 | 2.354 | 2.299 | 2.259 | 2.218 | 2.161 | 2.074 | 1.94 |