LeGO-LOAM-BOR#
什么是 LeGO-LOAM-BOR?#
- LeGO-LOAM-BOR 是 LeGO-LOAM 的改进版本,它提高了代码的质量,使其更具可读性和一致性.此外,通过将进程转换为多线程方法,还可以提高性能.
存储库信息#
原始仓库 link#
https://github.com/facontidavide/LeGO-LOAM-BOR
必需的传感器#
- LIDAR [VLP-16]
- IMU [9-AXIS]
ROS 兼容性#
- ROS 1
依赖#
- ROS Melodic ROS Installation
- PCL PCL Installation
- Gtsam GTSAM Installation
wget -O ~/Downloads/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip
cd ~/Downloads/ && unzip gtsam.zip -d ~/Downloads/
cd ~/Downloads/gtsam-4.0.0-alpha2/
mkdir build && cd build
cmake ..
sudo make install
构建并运行#
1) 构建#
cd ~/catkin_ws/src
git clone https://github.com/facontidavide/LeGO-LOAM-BOR.git
cd ..
catkin_make
2) 设置参数#
- 设置参数
LeGo-LOAM/loam_config.yaml
3) 运行#
source devel/setup.bash
roslaunch lego_loam_bor run.launch rosbag:=/path/to/your/rosbag lidar_topic:=/velodyne_points
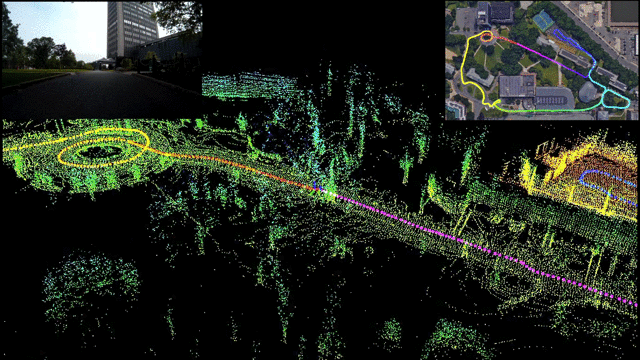
示例结果#


引用 LeGO-LOAM#
感谢您引用我们的 LeGO-LOAM 论文(如果您使用以下代码中的任何一个):
@inproceedings{legoloam2018,
title={LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain},
author={Tixiao Shan and Brendan Englot},
booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={4758-4765},
year={2018},
organization={IEEE}
}