评估控制器性能#
本页介绍如何使用 control_performance_analysis 包来评估控制器. control_performance_analysis 是分析控制模块跟踪性能的软件包
并监控车辆的驾驶状态.
如果您需要有关软件包的更多详细信息,请参考 control_performance_analysis.
如何使用#
开车前#
1. 首先,您需要启动 Autoware.您也可以将此工具用于真实车辆驾驶#
2. 初始化车辆并发送目标位置创建路线#
- 如果您在启动 Autoware 时遇到任何问题,请查看 教程 页面.
3. 启动 control_performance_analysis 包#
ros2 launch control_performance_analysis control_performance_analysis.launch.xml
- 执行此命令后,您应该能够在主题中看到 driving monitor 和 error 变量.
4. 在源终端中运行 PlotJuggler#
source ~/autoware/install/setup.bash
ros2 run plotjuggler plotjuggler
- 如果您的电脑中没有 PlotJuggler,请参考 这里 获取安装指南.
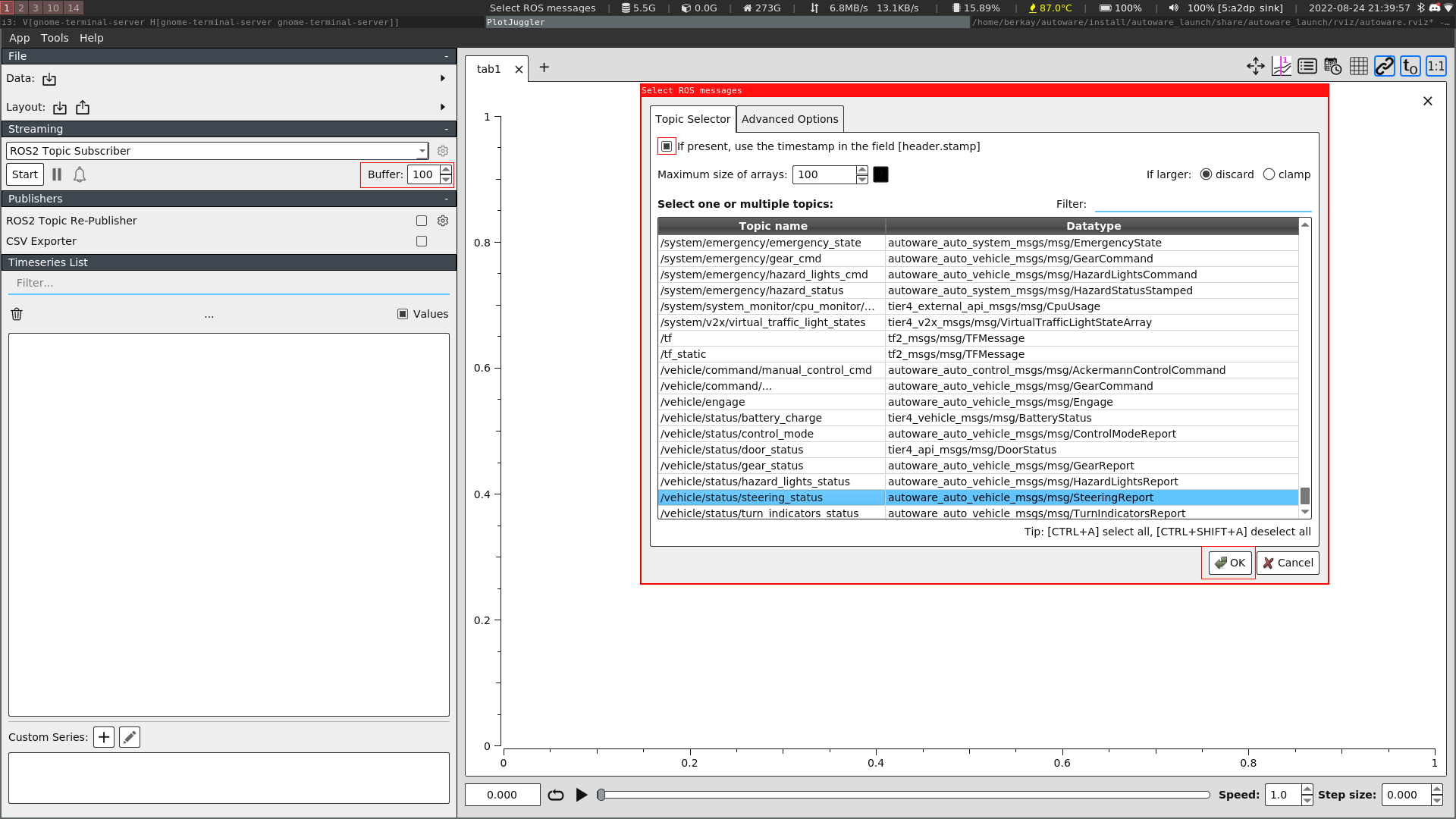
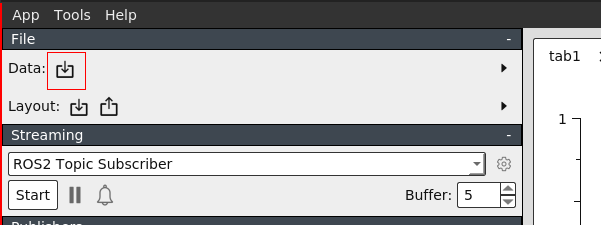
5. 增加缓冲区大小(最大值为 100),并从 /autoware_universe/control/control_performance_analysis/config/controller_monitor.xml 导入布局#
- 导入布局后,请指定下面列出的主题.
- /localization/kinematic_state
- /vehicle/status/steering_status
- /control_performance/driving_status
- /control_performance/performance_vars
- 请标记
如果存在,请在字段 [header.stamp] 中使用时间戳框,然后选择确定.
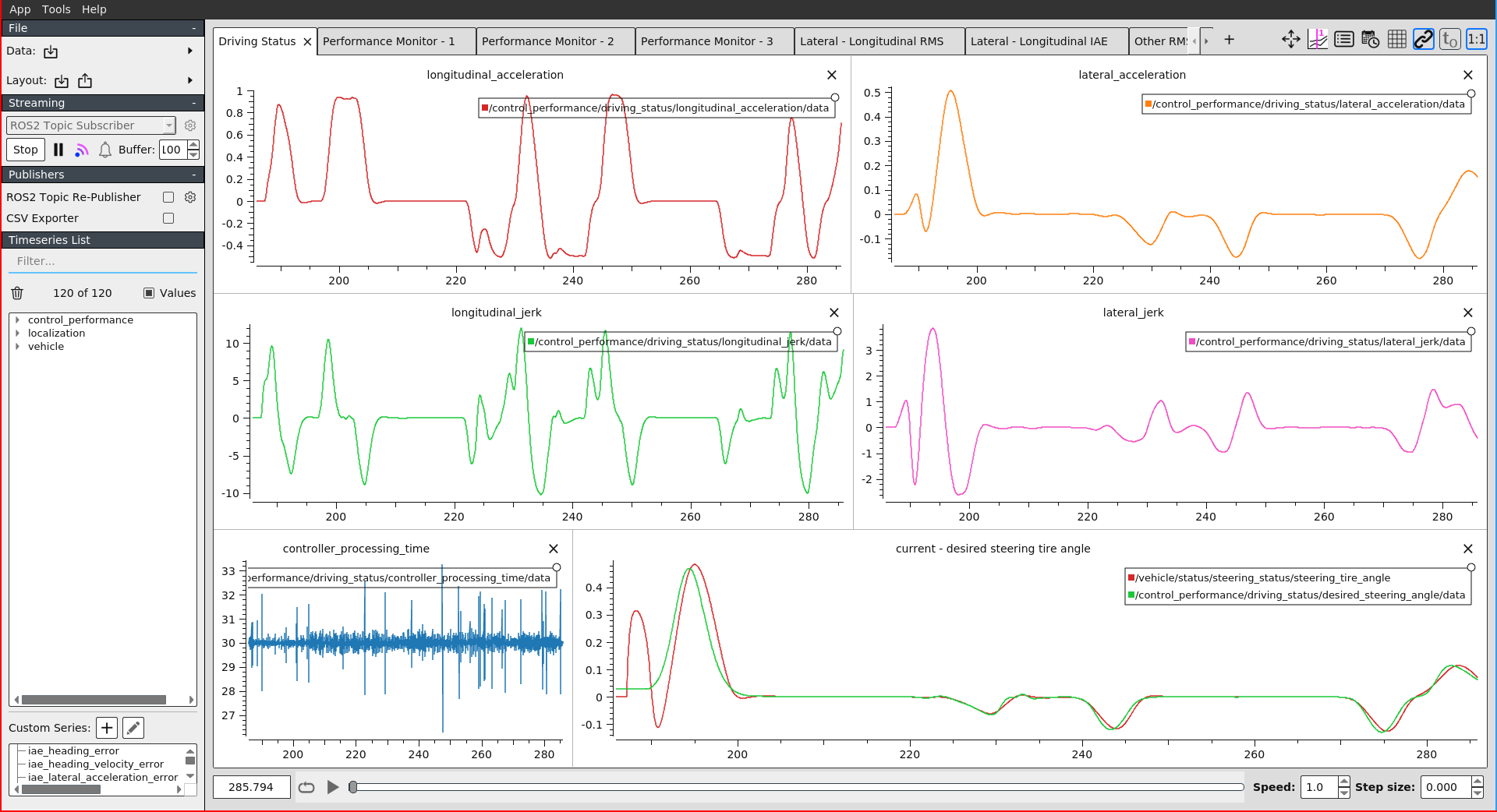
6. 现在,您可以开始开车了.您应该会在 PlotJuggler 中看到所有性能和驱动变量#
开车后#
1. 您可以导出统计输出和所有数据以进行比较和以后使用#
- 使用统计数据,您可以导出所有统计值,如 (min, max, average) 以比较控制器.
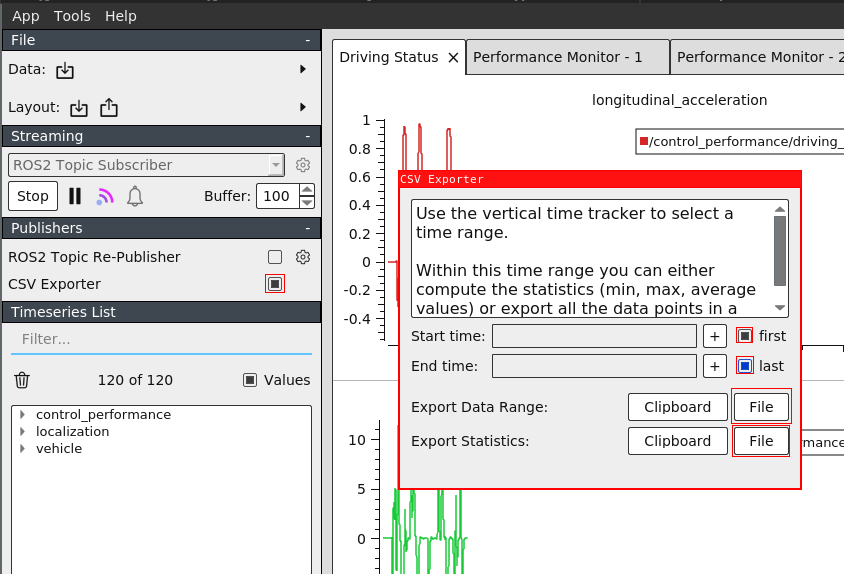
- 您还可以导出所有数据以备后用.要再次调查它们,请在启动 PlotJuggler 后,从数据部分导入
.cvs文件.
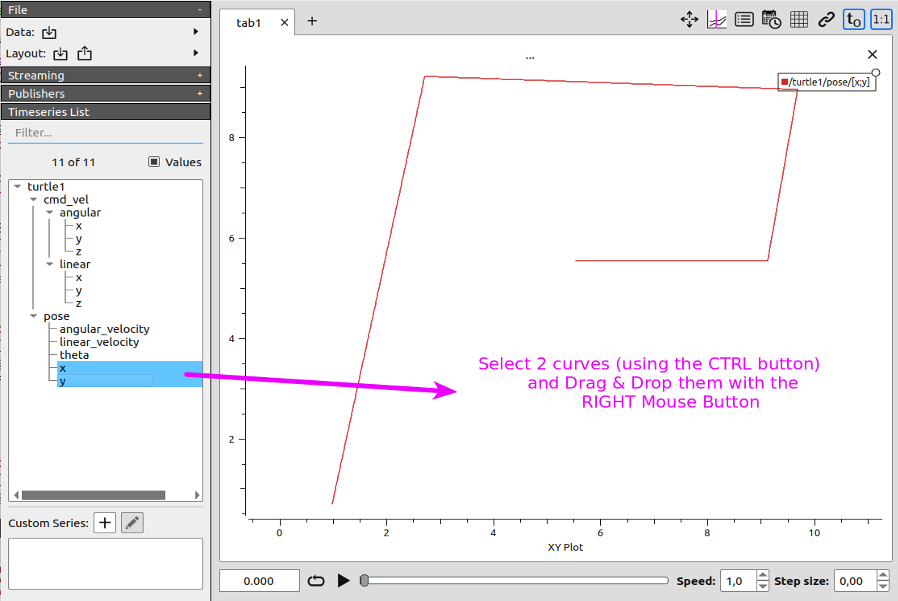
技巧#
- 您可以绘制车辆位置.选择两条曲线(按住CTRL键)并使用鼠标右键拖放它们.请访问 PlotJuggler 中的
帮助 -> Cheatsheet以查看更多提示.
- 如果您在绘图中看到太多的噪声曲线,您可以从 here 调整
odom_interval和low_pass_filter_gain以避免噪声数据.