Category others
分类:其他#
vm-07-01 Vector Map 创建范围#
在 toc 中#
创建车辆传感器范围内的所有 Lanelet,即使是那些位于非车辆驾驶道路上的 Lanelet,包括与车辆的 Lanelet 相交的 Lanelet.
但是,如果满足以下条件,则必须创建 lanelet 的范围至少为 10 米.
- 车辆在优先车道上行驶,穿过没有红绿灯的十字路口.
- 车辆直行或左转通过有红绿灯的十字路口
有关交叉路口要求的更多信息,请参阅 vm-03-04.
Autoware 的行为: 中省略#
Autoware 会检测接近的车辆并规划路线以避免碰撞.
注意#
检查车辆上的传感器范围.
首选向量映射#

在 toc 中省略#

vm-07-02 检测进入道路的行人范围#
在 toc 中#
Autoware 的功能用于检测路边的突然进入,跟踪超出道路边界的行人和骑行者,在可能进入道路时减速以防止碰撞.
设置以下类型的线串会指示 Autoware 忽略位于行外的线串,因为这些线不会造成弹出风险.
- guard_rail -墙 -栅栏
首选向量映射#

在 toc 中省略#
没有特别的.
相关 Autoware 模块#
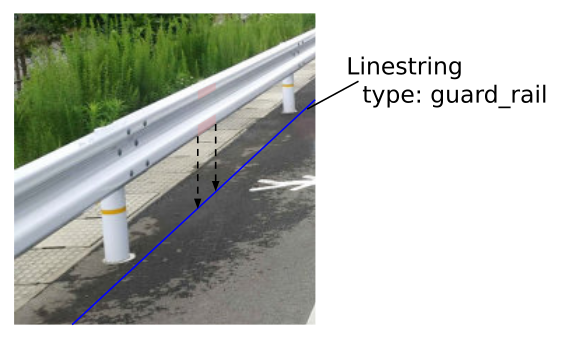
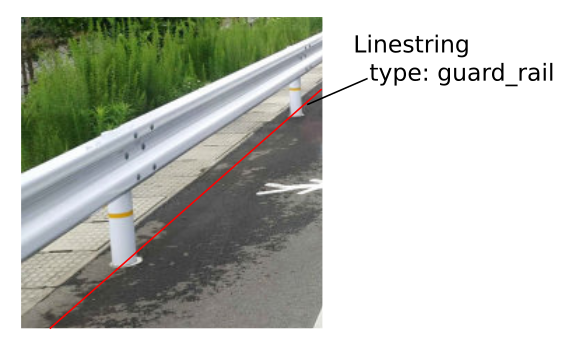
vm-07-03 护栏、护管、栅栏#
在 toc 中#
为护栏或护栏管道创建线串(type:guard_rail)时,请将其放置在道路一侧最突出的部分垂直投影到地面上的点.
请遵循与围栏线串相同的位置准则 (type:fence).
首选向量映射#
在 toc 中省略#
相关 Autoware 模块#
vm-07-04 椭球体高度#
在 toc 中#
Point 的高度应基于椭球体高度 (WGS84),以米为单位.

首选向量映射#
Point 的高度是从椭球体表面到地面的距离.
在 toc 中省略#
Point 的高度是正高,即从大地水准面到地面的距离.