创建 Lanelet#
在这个页面上,我们将解释如何在你的点云地图上创建一个简单的 lanelet. 如果您之前没有点云地图, 请检查 并按照 LIO-SAM 映射页面 了解如何为 Autoware 创建点云地图.
创建 Lanelet2#
首先,我们需要将点云地图导入 Vector Map Builder 工具:
- 请点击
文件. - 然后,单击
导入 PCD. - 单击
浏览并选择您的 .pcd 文件.
上传完成后,您将在 Vector Map Builder 工具上显示点云:
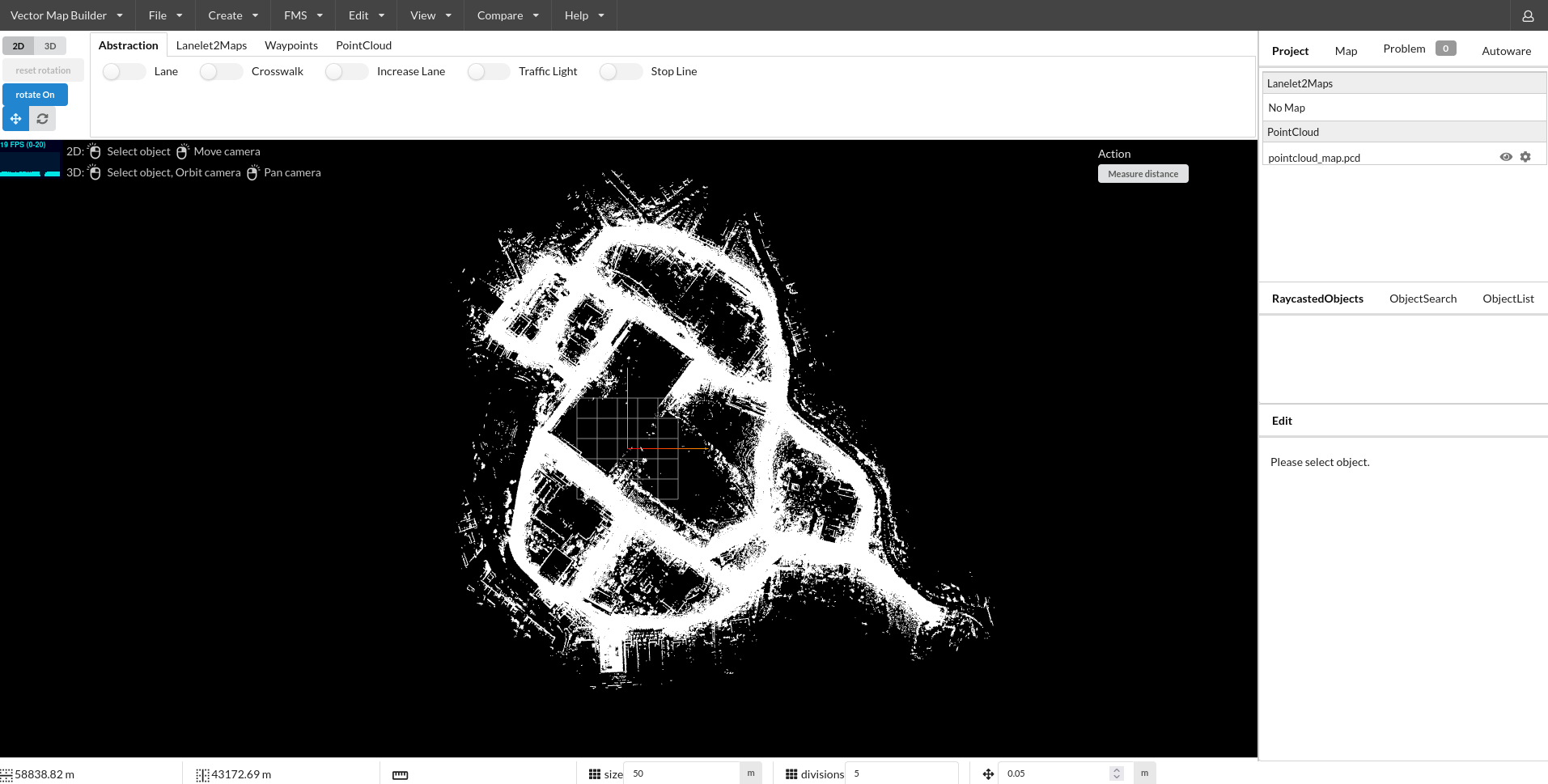
现在,我们准备在我们的点云地图上创建 lanelet2 地图:
- 请点击
创建. - 然后,点击
Create Lanelet2Maps. - 请填写您的地图名称
- 请填写您的 MGRS 区域.(tutorial_vehicle 时,MGRS 网格区:35T - MGRS 100,000 平方米:PF)
- 点击
创建.
创建简单的 lanelet#
为了在您的地图上创建一个简单的 lanelet,请按照以下步骤作:
- 点击吧台上的
Lanelet2Maps - 通过选择
Lanelet启用 Lanelet 模式. - 然后,您可以单击 pointcloud 地图来创建 lanelet.
- 如果您的 lanelet 已完成,您可以禁用
Lanelet. - 如果要更改 lanelet 宽度,请点击
lanelet-->Change Lanelet Width,然后就可以输入通道宽度了.
视频演示:
连接两个通道#
要加入两个 lanelet,请按照以下步骤作:
- 请创建两个不同的 lanelet.
- 选择一个 lanelet,然后按
Shift并选择其他 lanelet. - 现在,您可以看到
加入 Lanelets按钮,只需按下它. - 这些 lanelet 将被连接起来.
视频演示:
加入多个 lanelets#
如需将两个或多个 lanelet 添加(连接)到另一个 lanelet,请按照以下步骤作:
- 创建多个 lanelet.
- 您可以像前面的步骤一样加入前两个 lanelet.
- 请检查第一个 lanelet 的端点 ID.
- 然后你需要用 third lanelet 的 start point 来改变这些 id.(请选择 lanelet 的线串更改)
- 您将看到第一个 lanelet 的下一个 2 个车道将出现.
视频演示:
更改 Lanelet 的速度限制#
要更改 lanelet 的限速,请按照以下步骤作:
- 选择将更改限速的车道
- 在右侧面板上设置
限速.
使用规划模拟器测试 Lanelet#
创建 lanelet 完成后,我们需要保存它.
为此,请单击 文件 --> 导出 Lanelet2Maps ,然后下载.
下载完成后, 我们需要将 lanelet2 map 和 pointcloud map 放在同一个位置. 目录结构应如下所示:
<YOUR-MAP-DIRECTORY>/
├─ pointcloud_map.pcd
└─ lanelet2_map.osm
如果您的 .osm 或 .pcd 映射文件的名称与这些名称不同,则 您需要更新 autoware.launch.xml:
<!-- Map -->
- <arg name="lanelet2_map_file" default="lanelet2_map.osm" description="lanelet2 map file name"/>
+ <arg name="lanelet2_map_file" default="<YOUR-LANELET-MAP-NAME>.osm" description="lanelet2 map file name"/>
- <arg name="pointcloud_map_file" default="pointcloud_map.pcd" description="pointcloud map file name"/>
+ <arg name="pointcloud_map_file" default="<YOUR-POINTCLOUD-MAP-NAME>.pcd" description="pointcloud map file name"/>
现在我们准备启动规划模拟器:
ros2 launch autoware_launch planning_simulator.launch.xml map_path:=<YOUR-MAP-FOLDER-DIR> vehicle_model:=<YOUR-VEHICLE-MODEL> sensor_model:=<YOUR-SENSOR-KIT>
tutorial_vehicle示例:
ros2 launch autoware_launch planning_simulator.launch.xml map_path:=$HOME/Files/autoware_map/tutorial_map/ vehicle_model:=tutorial_vehicle sensor_model:=tutorial_vehicle_sensor_kit vehicle_id:=tutorial_vehicle
- 单击 rviz 上的
2D Pose Estimate按钮或按P并给出初始化姿势. - 点击 rviz 上的
2D 目标姿势按钮或按G并给出目标点的姿势.