SC-LeGO-LOAM#
什么是 SC-LeGO-LOAM?#
- SC-LeGO-LOAM 集成了 LeGO-LOAM,用于激光雷达里程计和 2 种不同的闭环方法:基于 ScanContext 和 Radius 搜索的闭环.虽然 ScanContext 正在校正较大的漂移,但基于半径搜索的方法适用于精细拼接.
存储库信息#
原始仓库 link#
https://github.com/irapkaist/SC-LeGO-LOAM
必需的传感器#
- LIDAR [VLP-16, HDL-32E, VLS-128, Ouster OS1-16, Ouster OS1-64]
- IMU [9-AXIS]
ROS 兼容性#
- ROS 1
依赖#
- ROS
- PCL
- GTSAM
wget -O ~/Downloads/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip
cd ~/Downloads/ && unzip gtsam.zip -d ~/Downloads/
cd ~/Downloads/gtsam-4.0.0-alpha2/
mkdir build && cd build
cmake ..
sudo make install
构建并运行#
1) 构建#
cd ~/catkin_ws/src
git clone https://github.com/irapkaist/SC-LeGO-LOAM.git
cd ..
catkin_make
2) 设置参数#
- 在
include/utility.h上设置 imu 和 lidar 主题 - 在
include/utility.h上设置激光雷达属性 - 在
include/Scancontext.h上设置扫描上下文设置
(Do not forget to rebuild after setting parameters.)
3) 运行#
source devel/setup.bash
roslaunch lego_loam run.launch
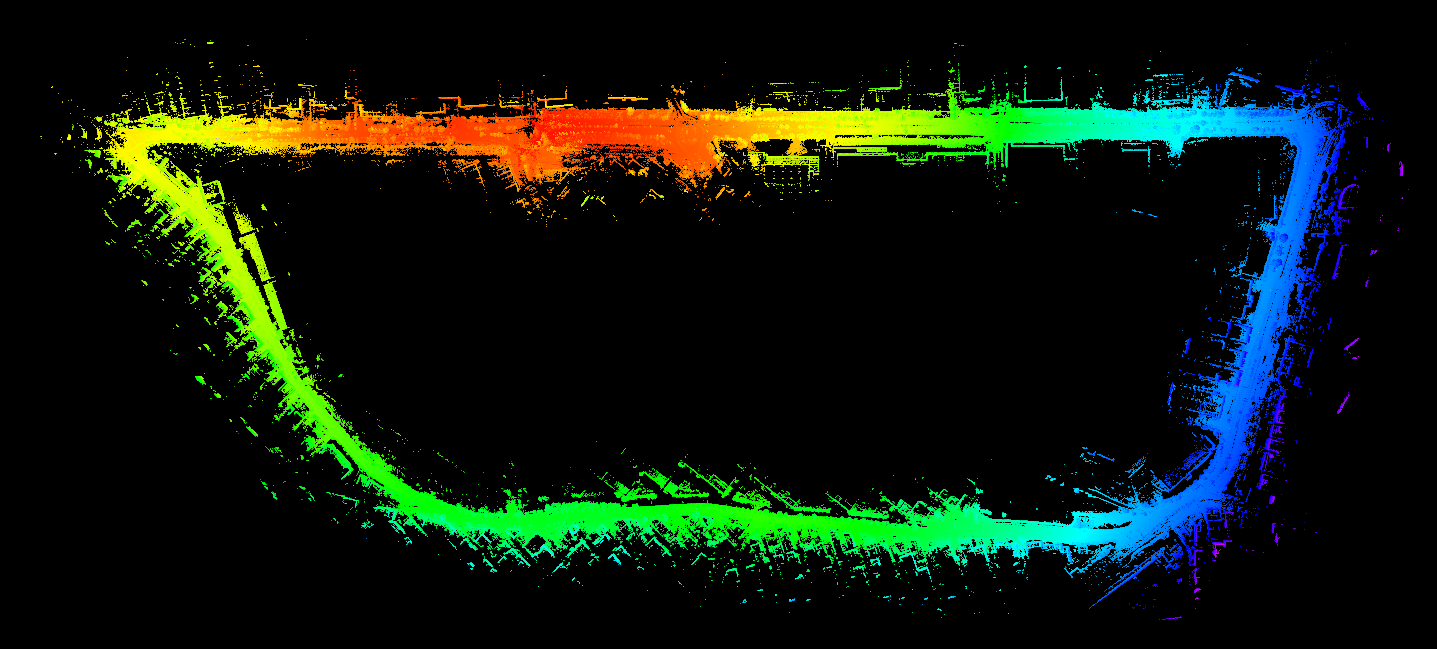
示例结果#
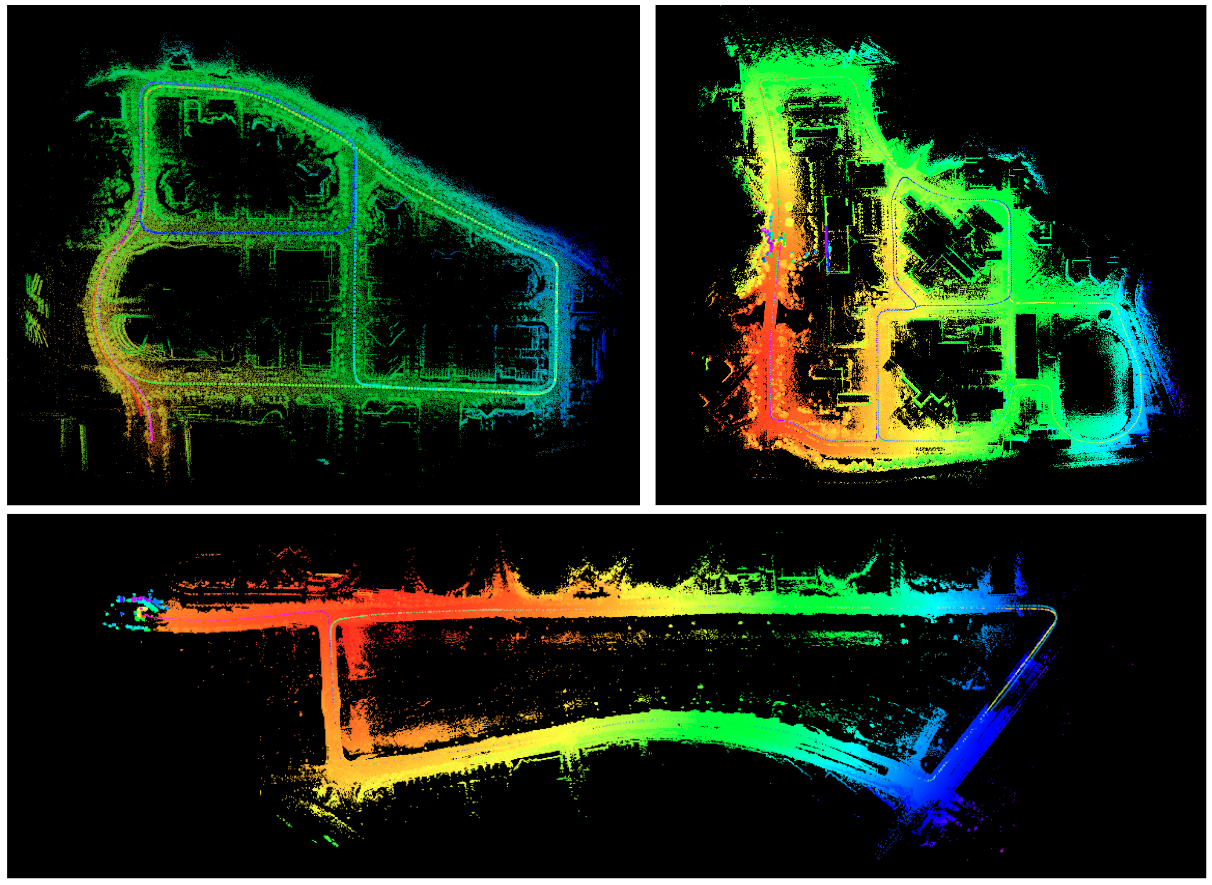
其他示例#
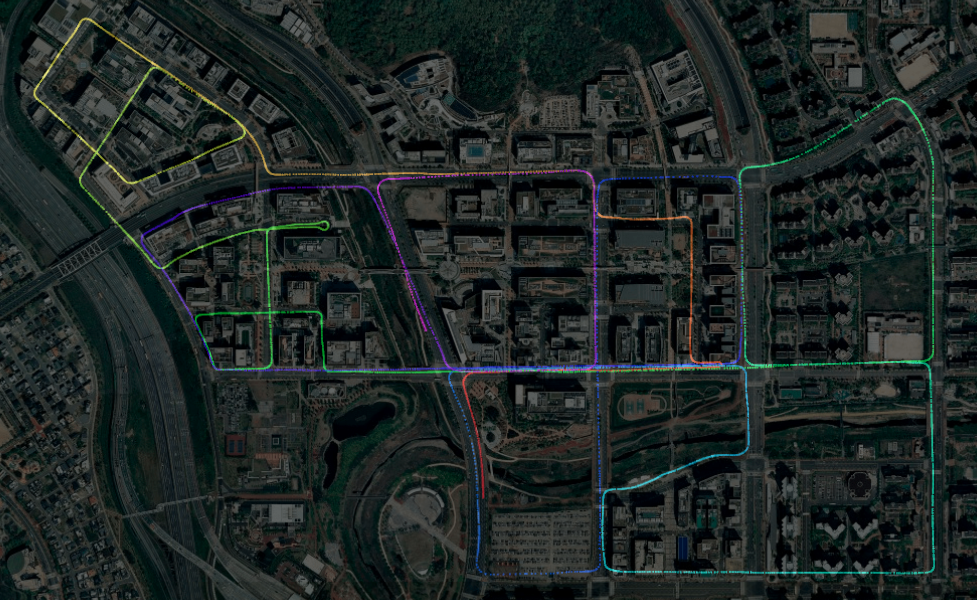
MulRan 数据集#
- 如果您想将结果复现为上述视频,您可以下载 MulRan 数据集,并使用 ROS 主题发布工具.
引用 SC-LeGO-LOAM#
@INPROCEEDINGS { gkim-2018-iros,
author = {Kim, Giseop and Kim, Ayoung},
title = { Scan Context: Egocentric Spatial Descriptor for Place Recognition within {3D} Point Cloud Map },
booktitle = { Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems },
year = { 2018 },
month = { Oct. },
address = { Madrid }
}
and
@inproceedings{legoloam2018,
title={LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain},
author={Shan, Tixiao and Englot, Brendan},
booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={4758-4765},
year={2018},
organization={IEEE}
}
联系#
- 保持: Giseop Kim (
paulgkim@kaist.ac.kr)