Pointcloud map downsampling#
概述#
当您创建的点云贴图太密集或太大(即超过 300 MB)时, 您可能希望对其进行下采样以提高计算和内存效率. 此外,您可以考虑使用带有部分加载的动态地图加载, 请查看 autoware_map_loader Package 了解更多信息.
在 tutorial_vehicle 实现时,我们将使用整个 map, 因此,我们将使用 CloudCompare 对其进行下采样.
安装 CloudCompare#
您可以通过快照安装它:
sudo snap install cloudcompare
请查看 官方页面 以获取安装选项.
对点云贴图进行下采样#
有三种 CloudCompare 上的子采样方法、
我们使用 Space 方法进行子采样,但如果你愿意,你可以使用其他方法.
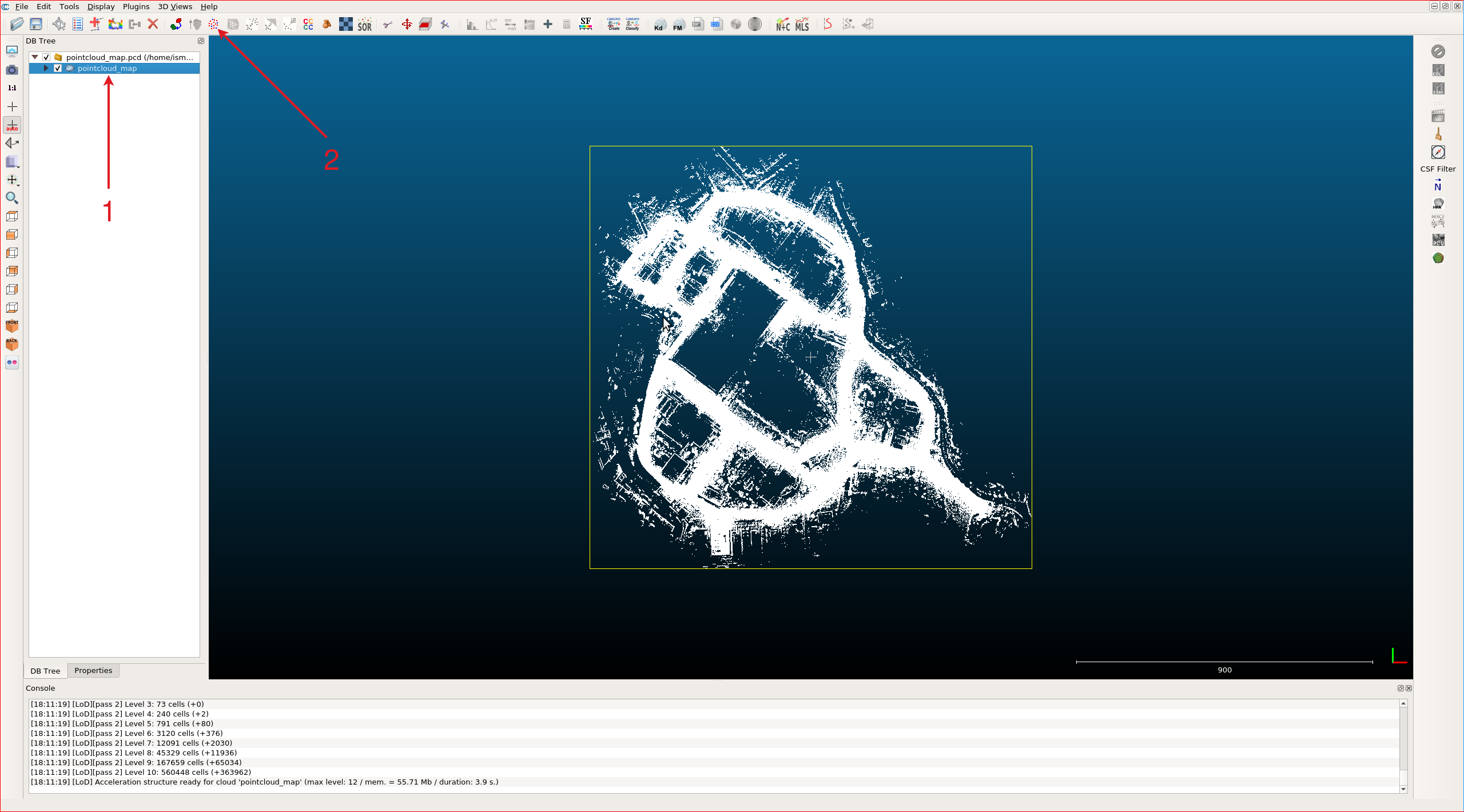
- 请打开 CloudCompare 并将您的点云拖到这里,然后您只需在 DB 树面板上单击地图即可选择您的点云地图.
- 然后您可以单击顶部面板上的
subsample按钮.
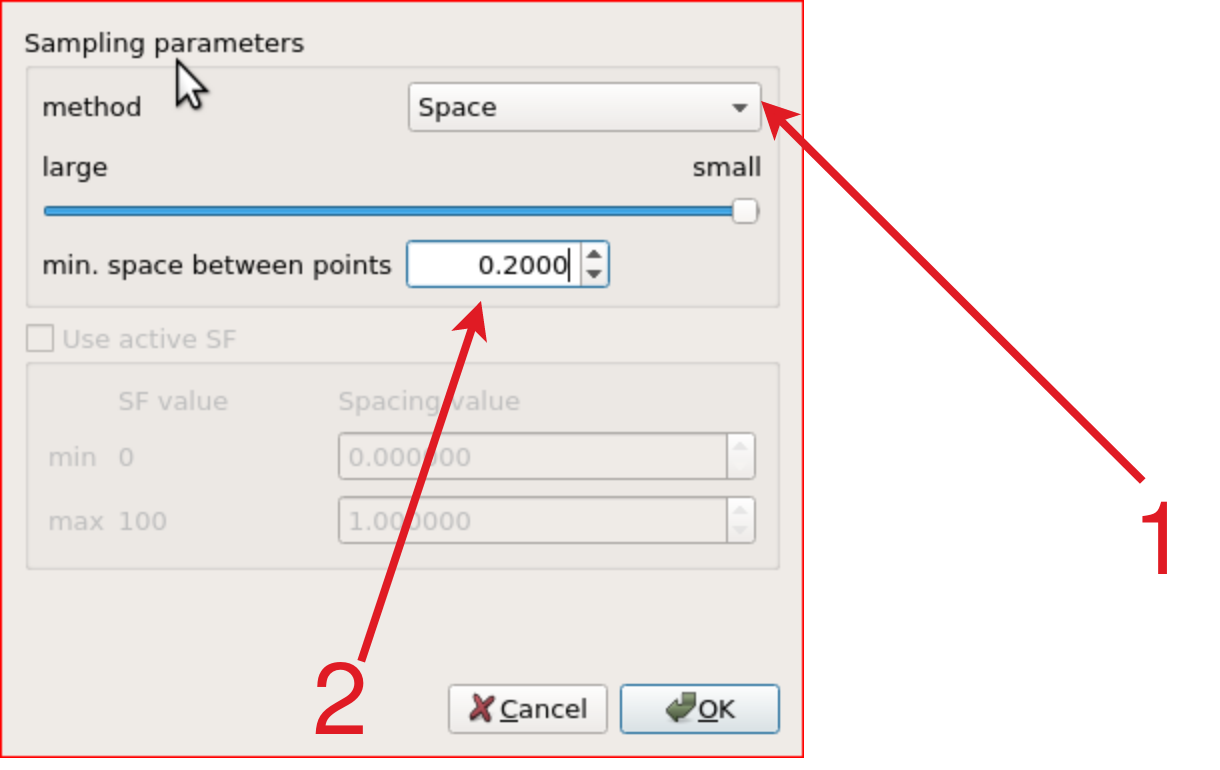
- 请选择您的子样品方法,我们将使用空间进行tutorial_vehicle.
- 然后你可以选择选项.例如,我们需要确定点之间的最小间距.(在本节中请小心,子采样取决于您的地图大小、计算机性能等.我们将tutorial_vehicle的 map 的此值设置为 0.2.
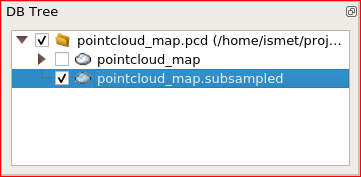
- 子采样过程完成后, 您还应该在 DB Tree 面板上选择 PointCloud.
现在
您可以使用 Ctrl + S 保存缩减采样的点云
或者您可以单击 文件 栏中的保存按钮.
然后,这个点云就可以被 autoware 使用.