概述#
要求:准备您的真实车辆硬件#
车辆的先决条件:
- 满足 Autoware 安装先决条件
- 以下设备附加
- 线控接口
- LiDAR
- 自选: 惯性测量单元
- 自选: Camera
- 自选: GNSS
1. 创建 Autoware 元存储库#
创建 Autoware 元存储库. 一种简单的方法是 fork autowarefoundation/autoware 并克隆它. 有关如何 fork 仓库的信息,请参阅 GitHub Docs.
git clone https://github.com/YOUR_NAME/autoware.git
如果您设置了多种类型的车辆,建议添加 autoware.vehicle_A 或 autoware.vehicle_B 等后缀.
2. 创建您的车辆和传感器描述#
接下来,您需要创建描述包来定义车辆的车辆和传感器配置.
创建以下两个包:
- YOUR_VEHICLE_launch 参见 sample_vehicle_launch
- YOUR_SENSOR_KIT_launch 参见 sample_sensor_kit_launch
创建后,您需要更新克隆的 Autoware 存储库的 autoware.repos 文件以引用这两个描述包.
- # sensor_kit
- sensor_kit/sample_sensor_kit_launch:
- type: git
- url: https://github.com/autowarefoundation/sample_sensor_kit_launch.git
- version: main
- # vehicle
- vehicle/sample_vehicle_launch:
- type: git
- url: https://github.com/autowarefoundation/sample_vehicle_launch.git
- version: main
+ # sensor_kit
+ sensor_kit/YOUR_SENSOR_KIT_launch:
+ type: git
+ url: https://github.com/YOUR_NAME/YOUR_SENSOR_KIT_launch.git
+ version: main
+ # vehicle
+ vehicle/YOUR_VEHICLE_launch:
+ type: git
+ url: https://github.com/YOUR_NAME/YOUR_VEHICLE_launch.git
+ version: main
适应 YOUR_VEHICLE_launch 自动软件启动系统#
在 YOUR_VEHICLE_description#
在车辆描述包中定义 URDF 和参数. 有关示例请参阅 sample_vehicle_description.
在 YOUR_VEHICLE_launch#
创建启动文件, 例如请参阅 sample_vehicle_launch.
如果您有多辆具有相同硬件设置的车辆,则可以指定 vehicle_id 来区分它们.
适应 YOUR_SENSOR_KIT_launch 自动软件启动系统#
在 YOUR_SENSOR_KIT_description#
在此处定义所有传感器的 URDF 和外部参数. 例如请参阅 sample_sensor_kit_description. 请注意,您需要事先校准所有传感器的外部参数.
在 YOUR_SENSOR_KIT_launch#
创建 launch/sensing.launch.xml 来启动车辆上所有传感器的接口. 例如请参阅 sample_sensor_kit_launch.
注意
此时,您现在可以运行 Autoware 的 Planning Simulator 来对您的车辆和传感包进行基本测试. 为此,您需要使用克隆的存储库构建和安装 Autoware.按照 Docker 或源安装步骤(从依赖项安装步骤开始),然后运行以下命令:
ros2 launch autoware_launch planning_simulator.launch.xml vehicle_model:=YOUR_VEHICLE sensor_kit:=YOUR_SENSOR_KIT map_path:=/PATH/TO/YOUR/MAP
3. 创建 vehicle_interface 包#
您需要为您的车辆创建一个接口包.该软件包应提供以下两个功能.
- 接收来自
vehicle_cmd_gate的命令消息并相应地驾驶车辆 - 将车辆状态信息发送到 Autoware
vehicle_interface 您可以参考 vehicle-interface 设计文档. 您还可以参考 TIER IV 的 pacmod_interface 仓库 作为车辆接口包的示例.
4. 创建地图#
您需要点云地图和矢量地图才能使用 Autoware. 有关地图设计的更多信息,请点击 这里.
创建点云地图#
使用第三方工具(例如基于 LiDAR 的 SLAM(同步定位和地图构建)包)创建 .pcd 格式的点云地图.
有关更多信息,请单击 here.
创建矢量地图#
使用 TIER IV‘s Vector Map Builder 等第三方工具创建 Lanelet2 格式的 .osm 文件.
5. 启动 Autoware#
本节简要介绍如何使用 Autoware 运行您的车辆.
安装 Autoware#
按照 Autoware 安装步骤.
启动 Autoware#
使用以下命令启动 Autoware:
ros2 launch autoware_launch autoware.launch.xml vehicle_model:=YOUR_VEHICLE sensor_kit:=YOUR_SENSOR_KIT map_path:=/PATH/TO/YOUR/MAP
设置初始姿势#
如果 GNSS 可用, Autoware 会自动初始化姿势.
如果没有,则需要使用 RViz GUI 设置初始姿势.
- 单击工具栏中的 2D 姿势估计按钮,或按 P 键
- 在 3D 视图窗格中,单击并按住鼠标左键,然后拖动以设置初始姿势的方向.
设置目标姿势#
为 ego 车辆设置目标姿势.
- 单击工具栏中的 2D 导航目标按钮,或按 G 键
- 在 3D 视图窗格中,单击并按住鼠标左键,然后拖动以设置目标姿势的方向. 如果成功,您将在 RViz 上看到计算出的规划路径.
点火#
在终端中,执行以下命令.
source ~/autoware.YOURS/install/setup.bash
ros2 topic pub /autoware.YOURS/engage autoware_auto_vehicle_msgs/msg/Engage "engage: true" -1
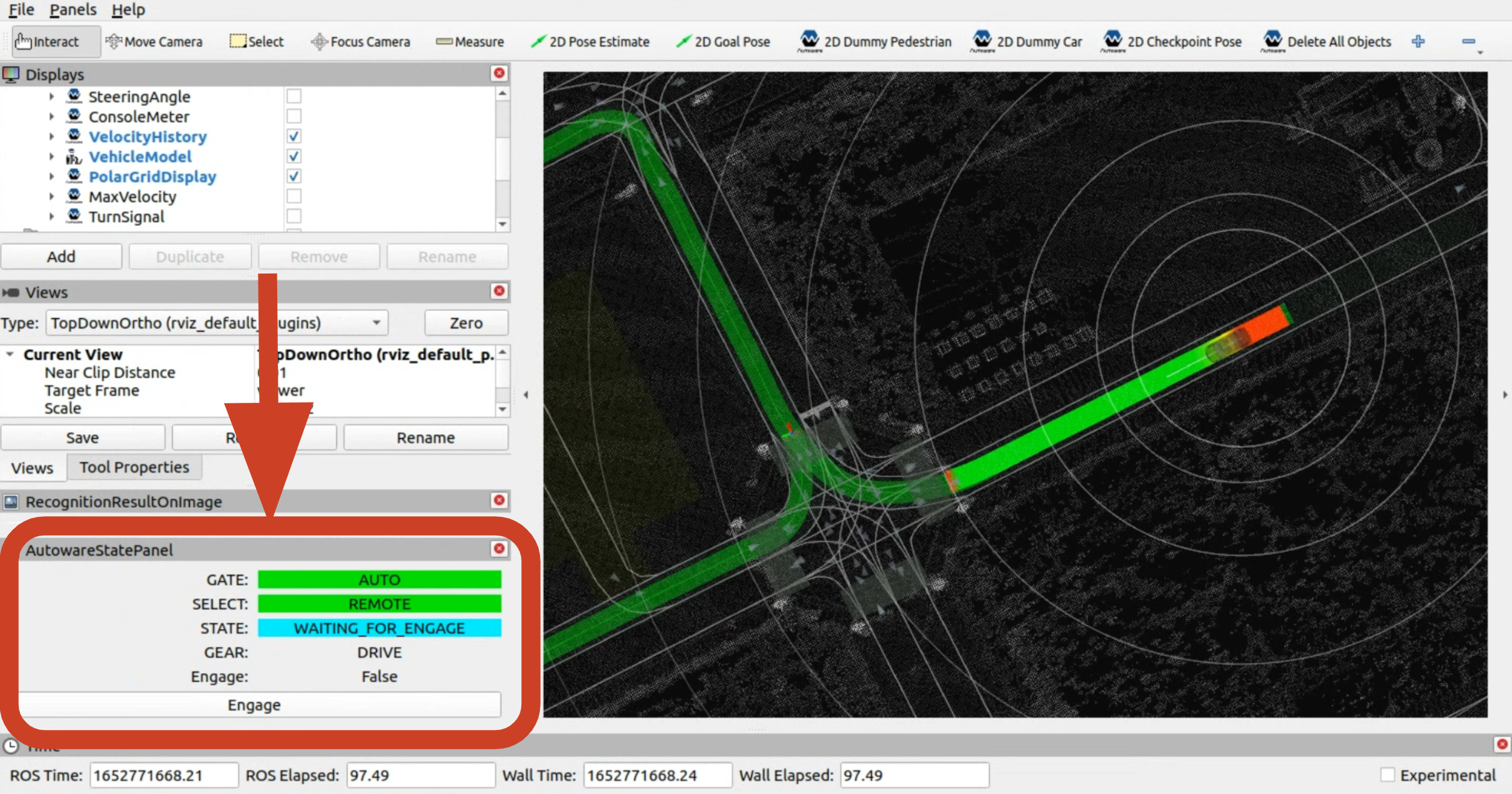
您还可以通过 RViz 与 AutowareStatePanel 进行交互.
该面板可以在 Panels > Add New Panel > tier4_state_rviz_plugin > AutowareStatePanel 中找到.
现在,车辆应该沿着计算的路径行驶!
6. 为您的车辆和环境调整参数#
您可能需要根据您将作车辆的域调整参数.
最大速度定义在 这里 定义, 默认为 15km/h.