规划模拟#
准备#
下载并解压缩示例地图.
- 您也可以手动下载 地图.
gdown -O ~/autoware_map/ `https://docs.google.com/uc?export=download&id=1499_nsbUbIeturZaDj7jhUownh5fvXHd`
unzip -d ~/autoware_map ~/autoware_map/sample-map-planning.zip
注意
示例地图:版权所有 2020 TIER IV, Inc.
检查你是否有 ~/autoware_data 文件夹和文件.
$ cd ~/autoware_data
$ ls -C -w 30
image_projection_based_fusion
lidar_apollo_instance_segmentation
lidar_centerpoint
tensorrt_yolo
tensorrt_yolox
traffic_light_classifier
traffic_light_fine_detector
traffic_light_ssd_fine_detector
yabloc_pose_initializer
如果没有,请按照 手动下载工件 进行作.
更改 最大速度,默认为 15 公里/小时.
基本模拟#
!!! 提示 [使用 Autoware Launch GUI](#using-autoware-launch-gui)
如果您更喜欢使用图形用户界面 (GUI) 而不是命令行来启动和管理仿真,请参阅本文档末尾的 `使用 Autoware Launch GUI` 部分,以获取分步指南.
车道驾驶场景#
1. 启动 Autoware#
source ~/autoware/install/setup.bash
ros2 launch autoware_launch planning_simulator.launch.xml map_path:=$HOME/autoware_map/sample-map-planning vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kit
警告
请注意,您不能在此处使用 ~ 而不是 $HOME.
如果使用 ~,则地图将无法加载.
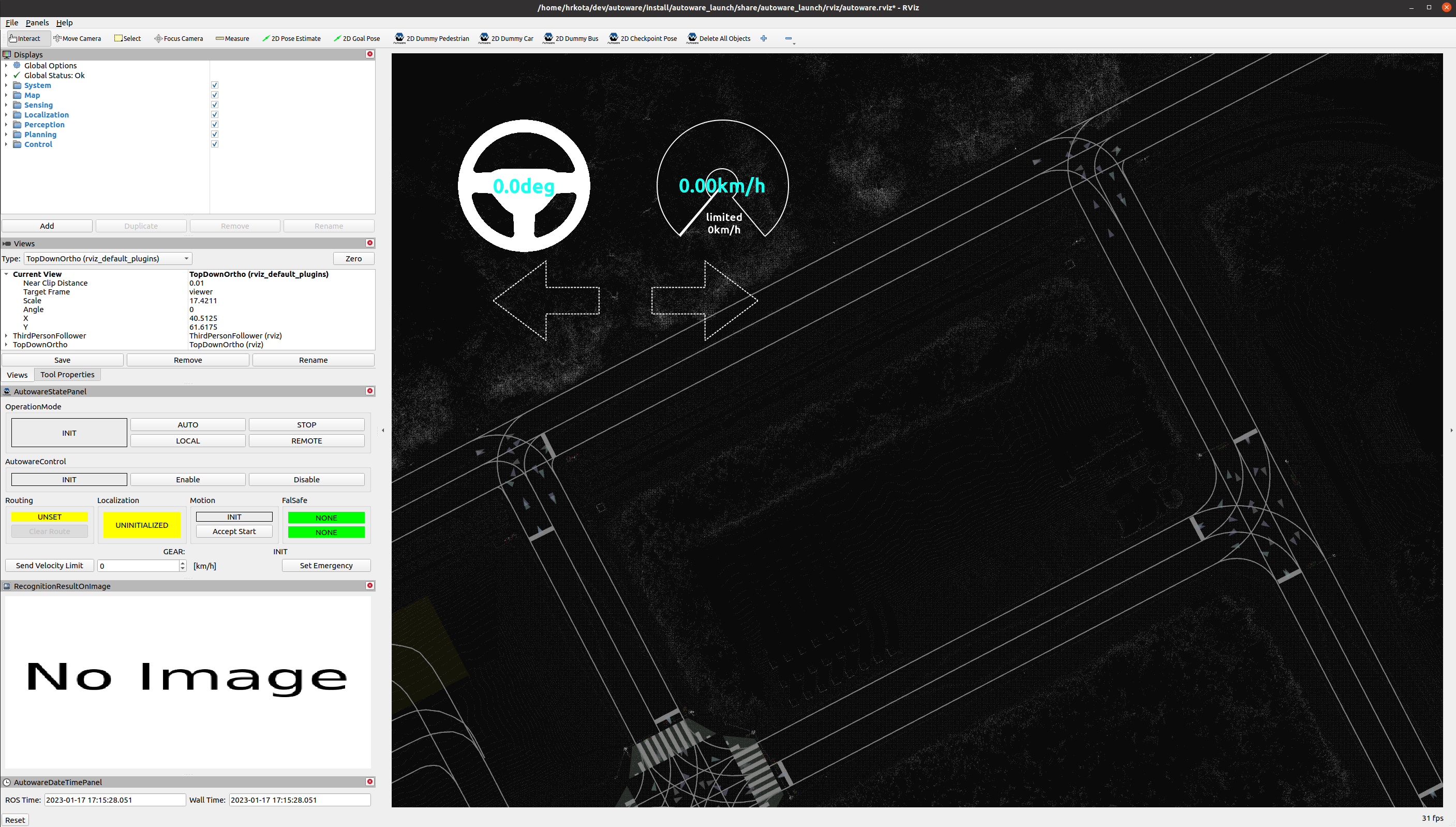
2. 为 ego 车辆设置初始姿势#
a) 单击工具栏中的 2D 姿势估计 按钮,或按 P 键.
b) 在 3D View 窗格中,单击并按住鼠标左键,然后拖动以设置初始姿势的方向.现在应该显示代表车辆的图像.
警告
请记住将汽车的初始姿势设置为与车道相同的方向.
要确认车道的方向,请确认地图上显示的箭头.
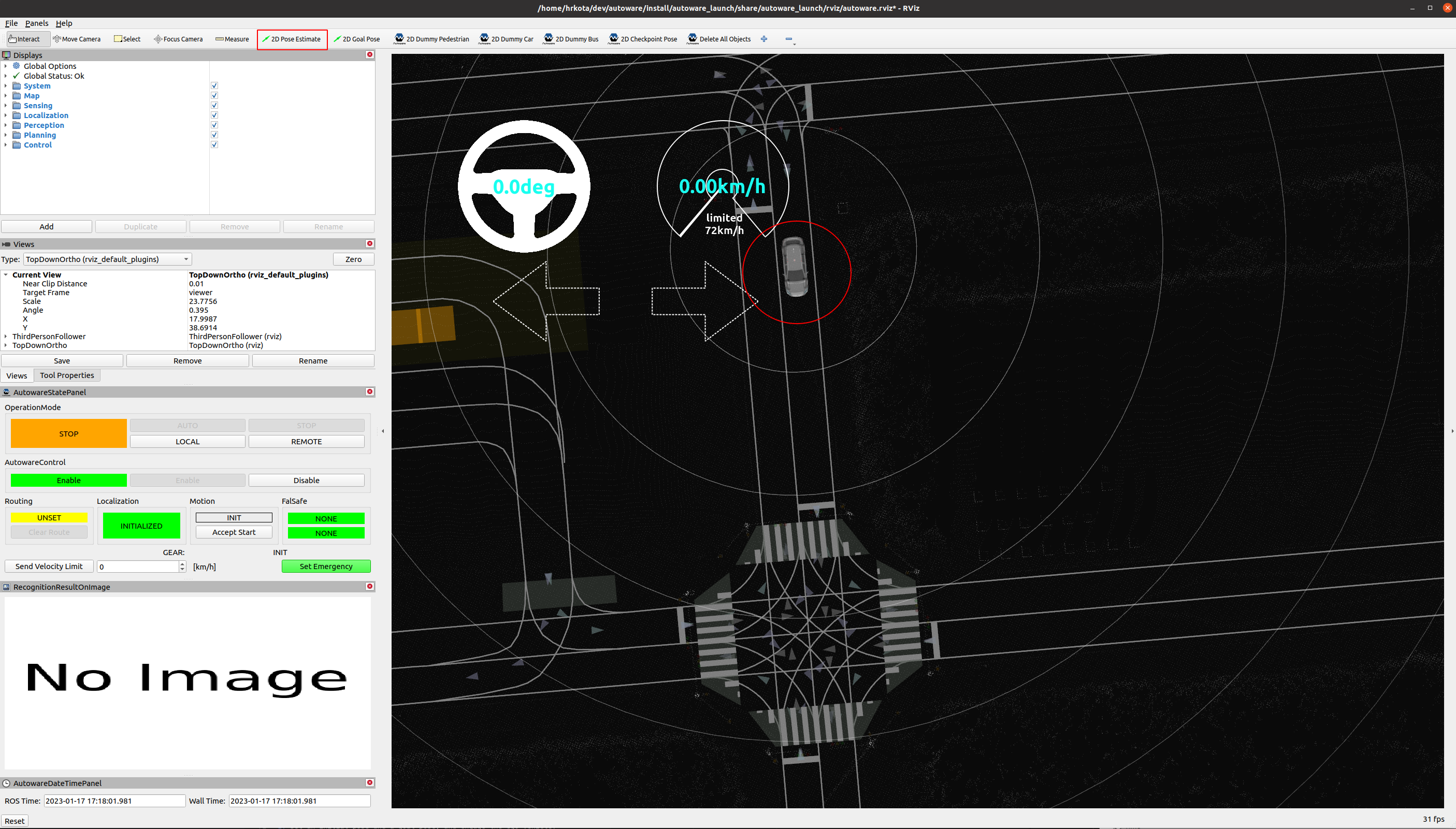
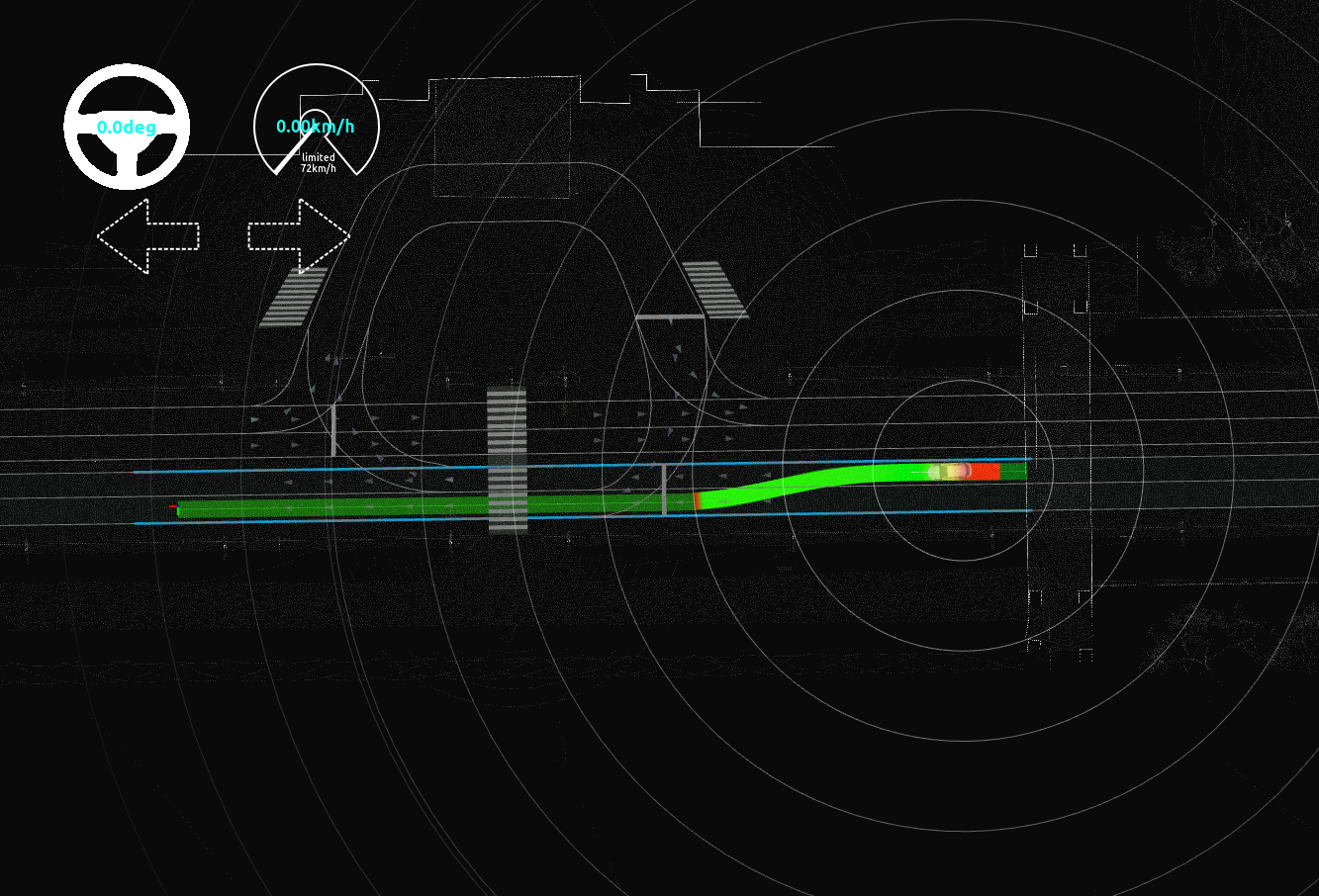
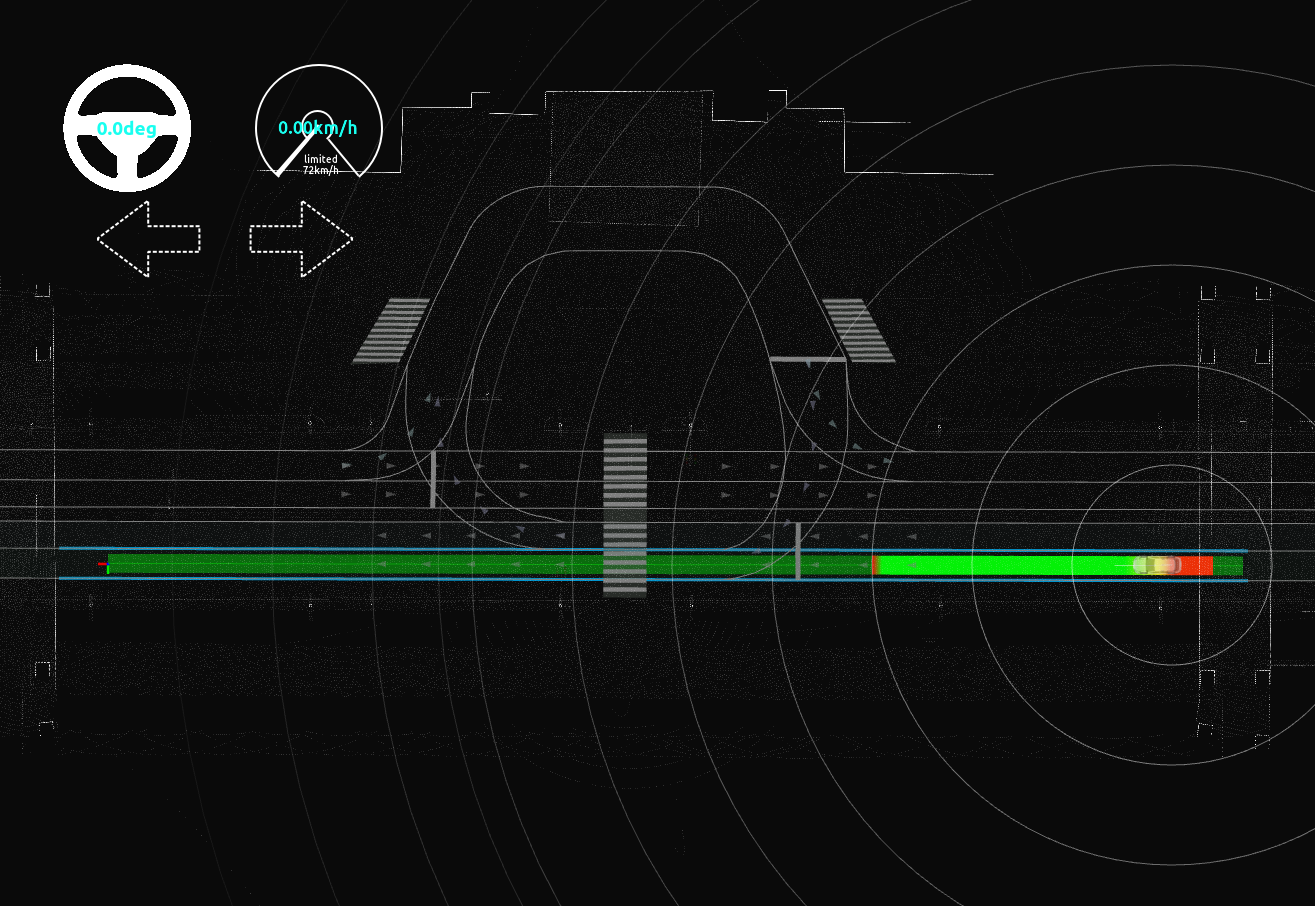
3. 为 ego 车辆设置目标姿势#
a) 单击工具栏中的 2D 目标姿势 按钮,或按 G 键.
b) 在 3D View 窗格中,单击并按住鼠标左键,然后拖动以设置目标姿势的方向.如果作正确,您将看到从初始姿势到目标姿势的计划路径.
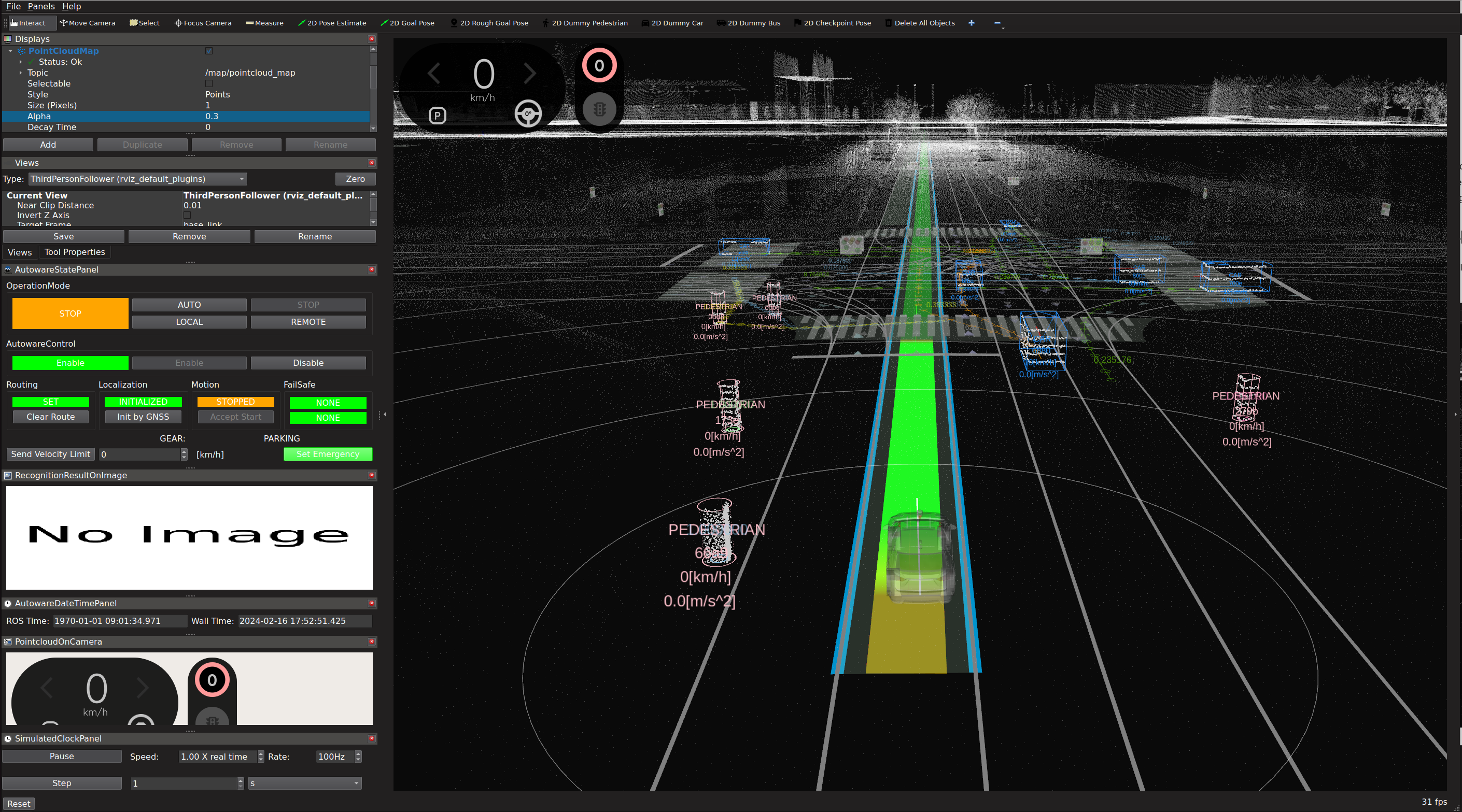
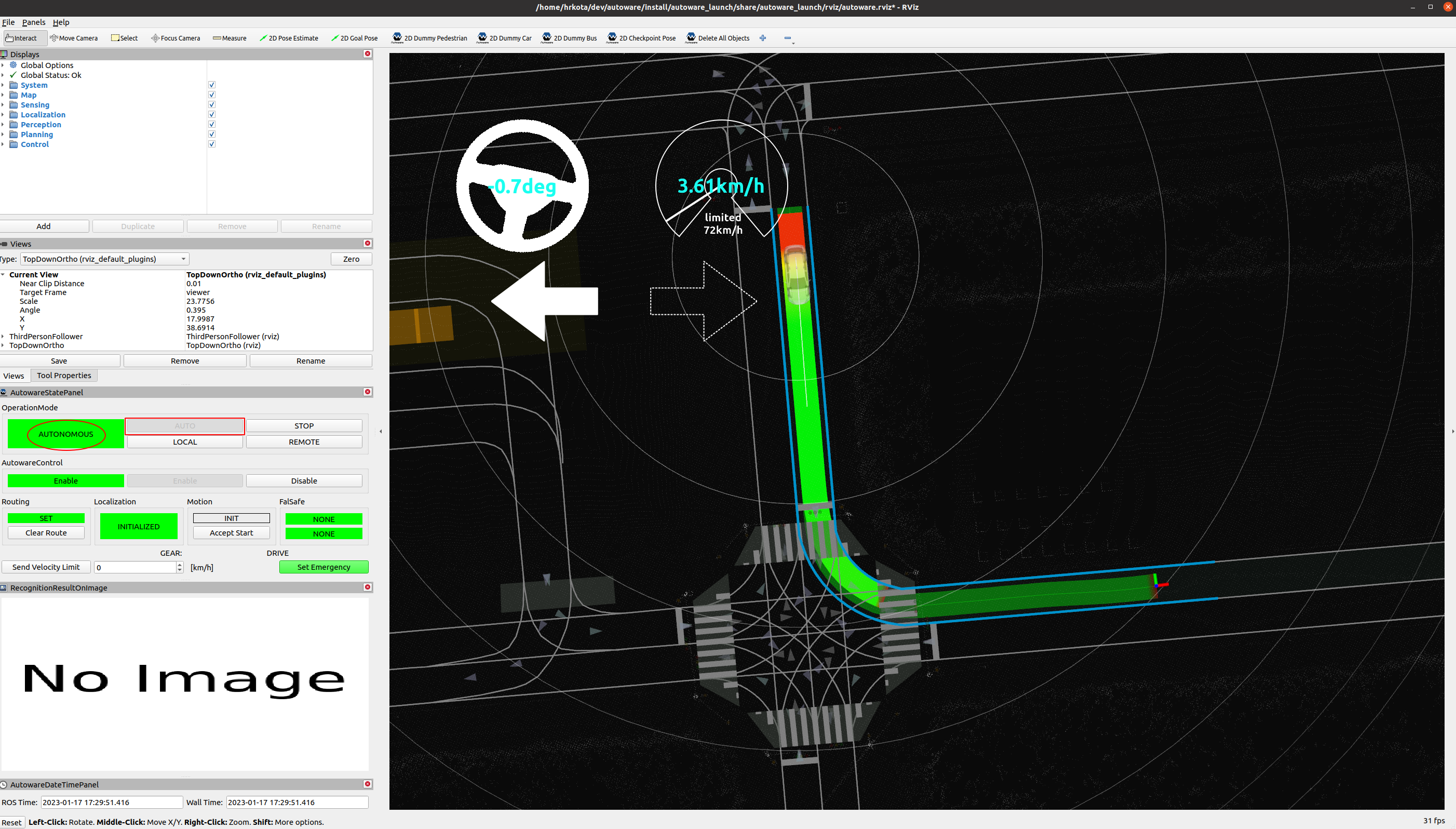
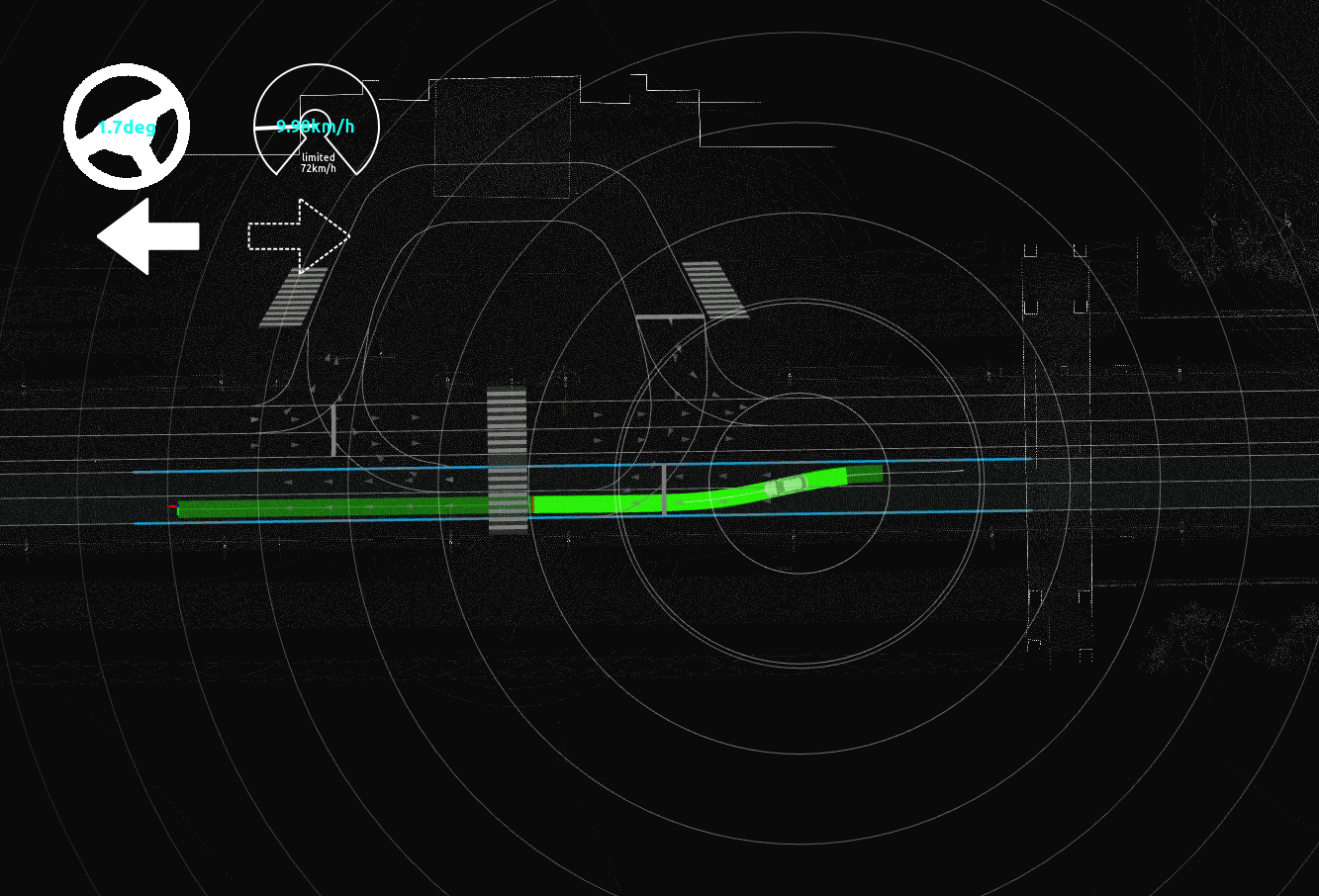
4. 启动 ego 车辆#
现在您可以通过单击 AutowareStatePanel 中 OperationMode 上的 AUTO 按钮来启动自主车辆驾驶.或者,您可以通过运行以下命令来手动启动车辆:
source ~/autoware/install/setup.bash
ros2 service call /api/operation_mode/change_to_autonomous autoware_adapi_v1_msgs/srv/ChangeOperationMode {}
之后,您可以在 OperationMode 上看到 AUTONOMOUS 标志,并且 AUTO 按钮显示为灰色.
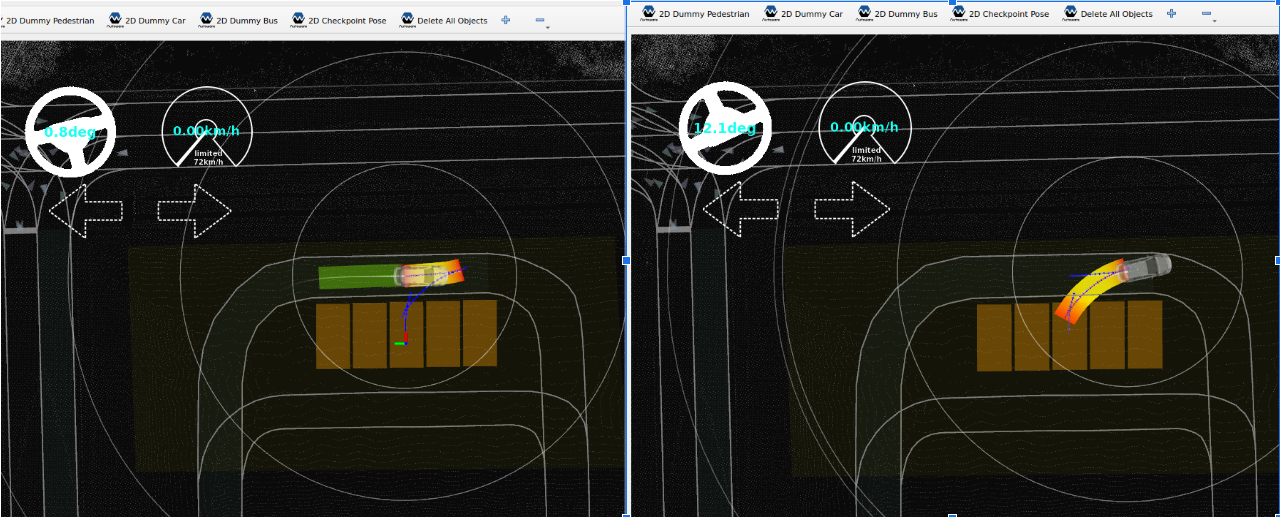
停车场景#
-
设置初始姿势和目标姿势,并接合自我车辆.
-
当车辆接近目标时,它将从车道驾驶模式切换到停车模式.
-
之后,车辆将倒车进入目的地停车位.
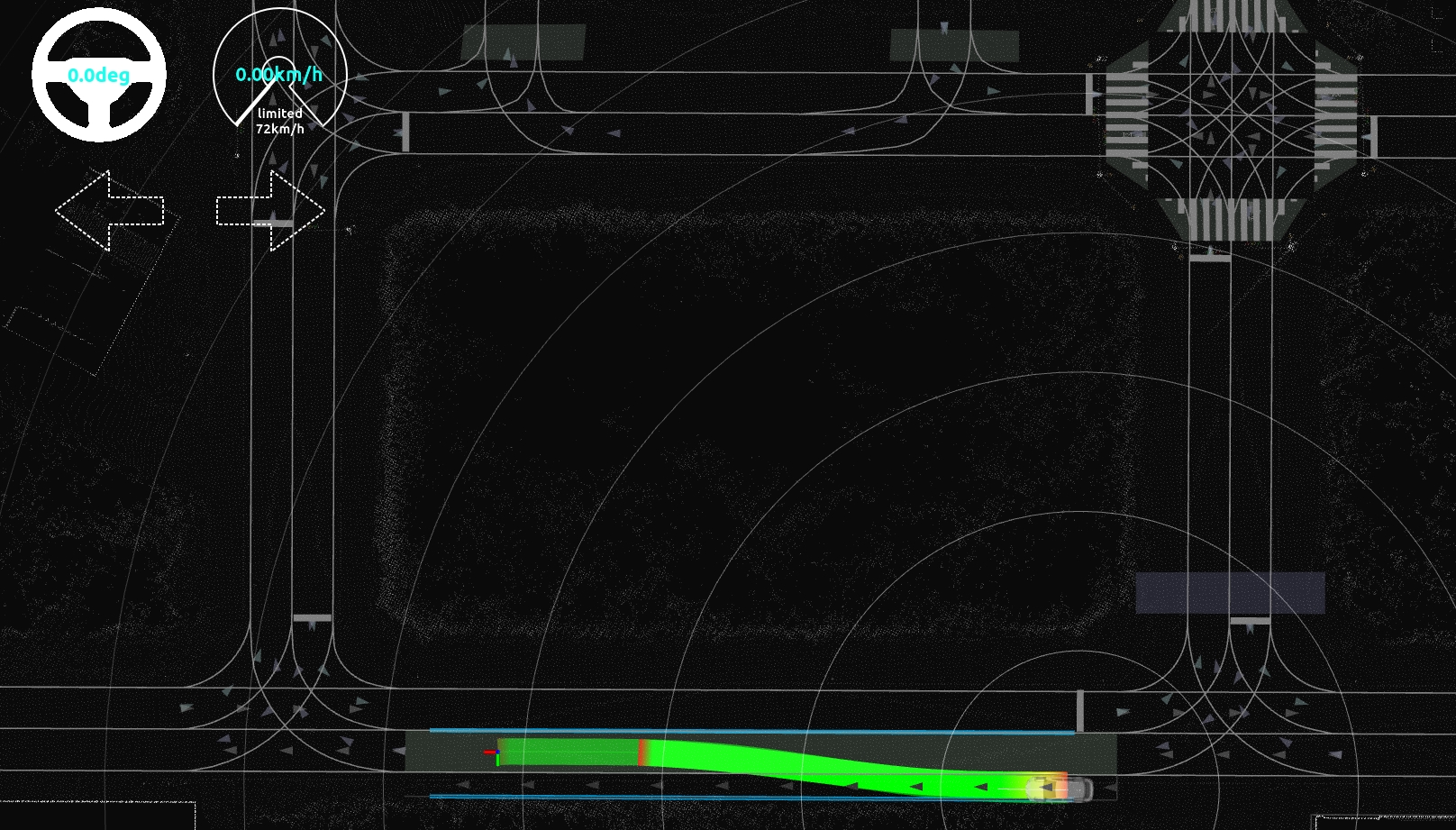
拉出和拉过来场景#
-
在拉出场景中,将 ego 车辆设置在路肩上.
-
设定一个目标,然后参与自我的载体.
-
在停车场景中,同样将自我车辆设置在车道上,并在路肩上设定目标.
变道场景#
-
下载并解压 Nishishinjuku 地图.
gdown -O ~/autoware_map/ `https://github.com/tier4/AWSIM/releases/download/v1.1.0/nishishinjuku_autoware_map.zip` unzip -d ~/autoware_map ~/autoware_map/nishishinjuku_autoware_map.zip -
使用以下命令启动 autoware with Nishishinjuku map:
source ~/autoware/install/setup.bash ros2 launch autoware_launch planning_simulator.launch.xml map_path:=$HOME/autoware_map/nishishinjuku_autoware_map vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kit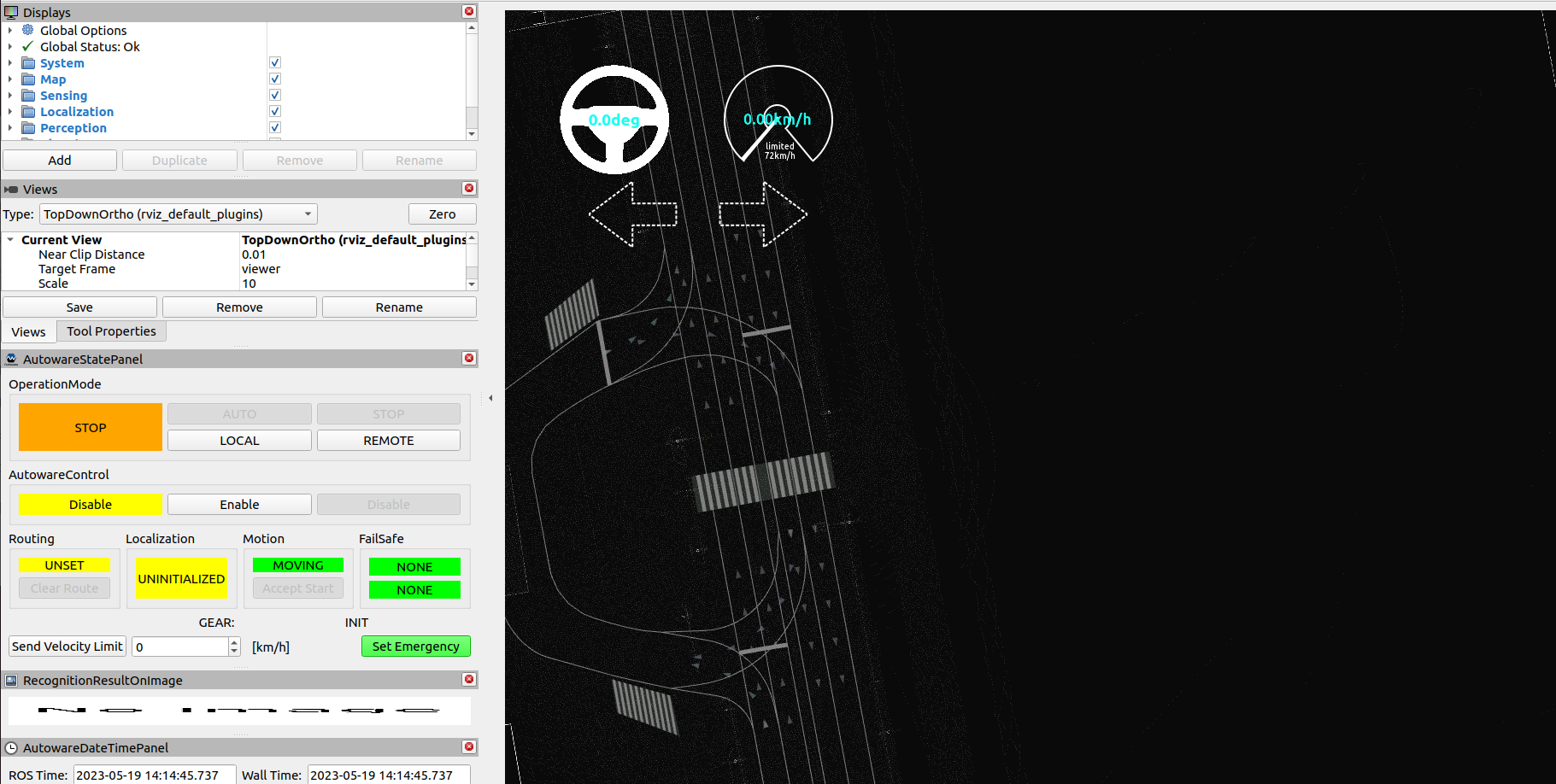
-
在相邻泳道中设置初始姿势和目标姿势.
-
参与自我的载体.它将沿着规划的路径变道.
避免情况#
-
在同一泳道中设置初始姿势和目标姿势.将规划一条路径.
-
在路边设置
2D Dummy Bus.将规划一条新的路径.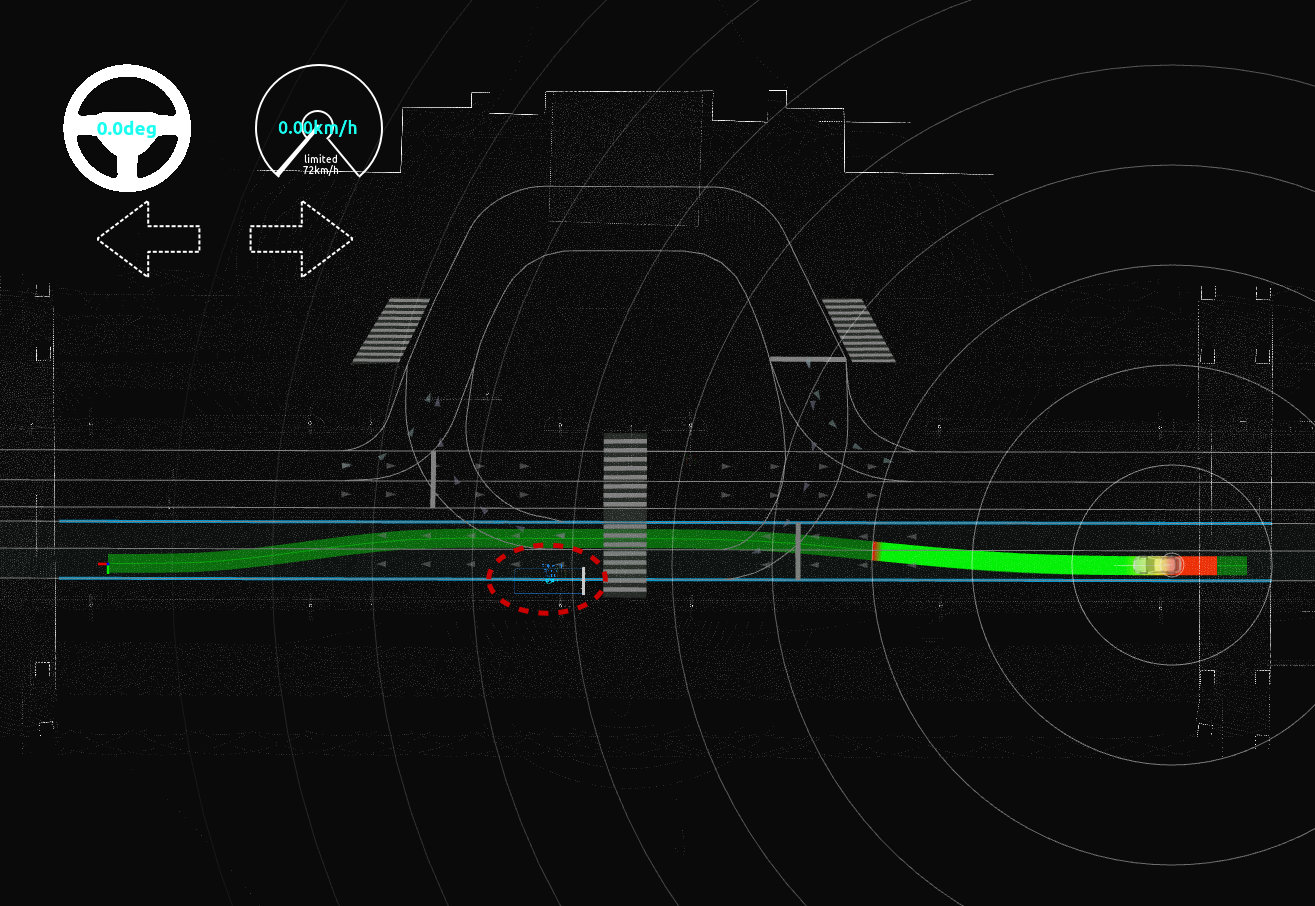
-
参与自我的载体.它将避开新规划路径上的障碍物.
高级模拟#
放置虚拟对象#
- 单击工具栏中的
2D Dummy Car或2D Dummy Pedestrian按钮. - 通过在地图上单击并拖动来设置虚拟对象的姿势.
-
在面板中将对象的速度设置为
Tool Properties -> 2D Dummy Car/Pedestrian.!!! 注意
对
velocity参数的更改将仅影响更改参数后放置的对象.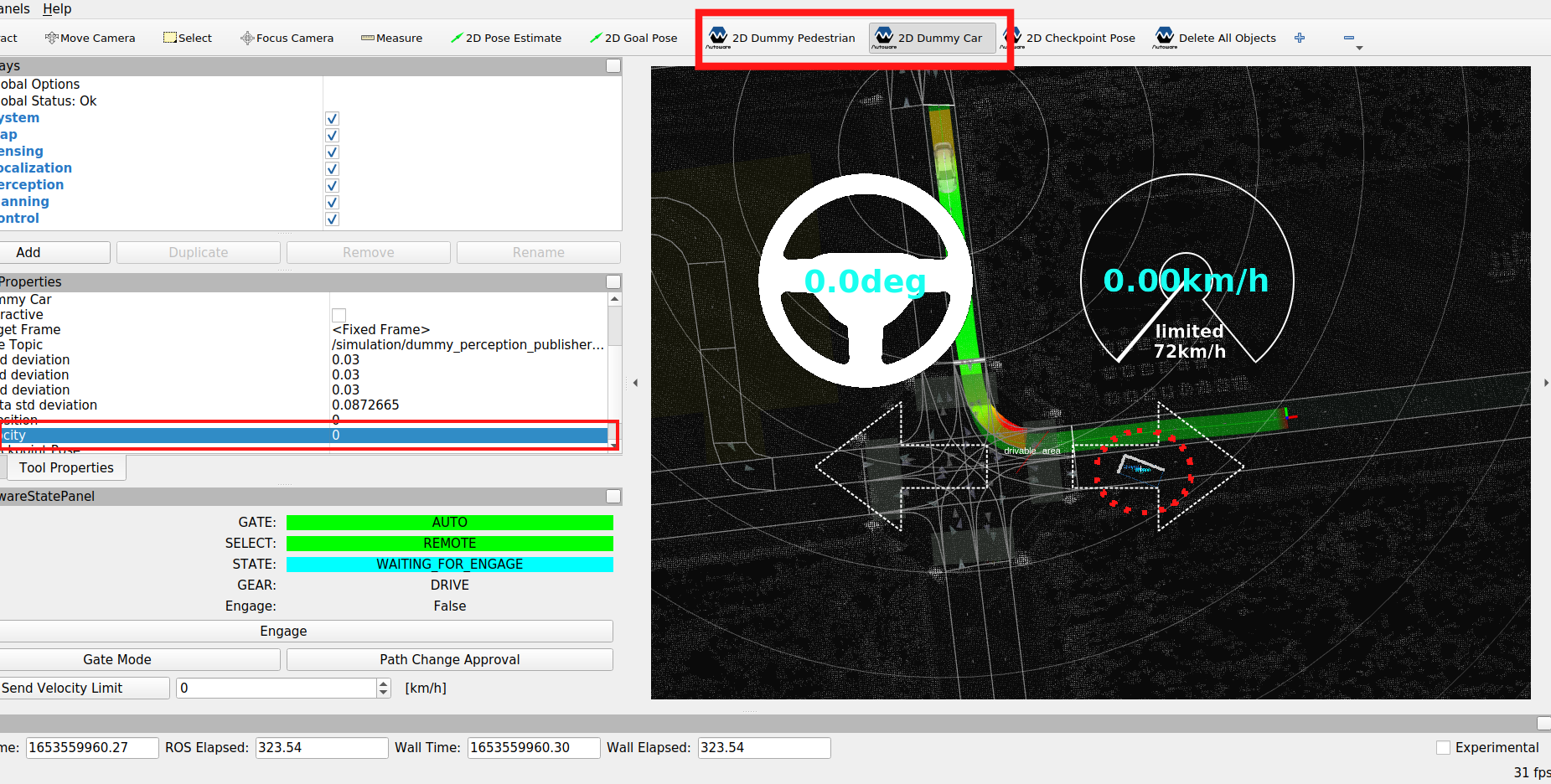
-
通过单击工具栏中的
Delete All Objects按钮删除放置在视图中的任何虚拟对象. -
单击工具栏中的
Interactive按钮,使虚拟对象具有交互性.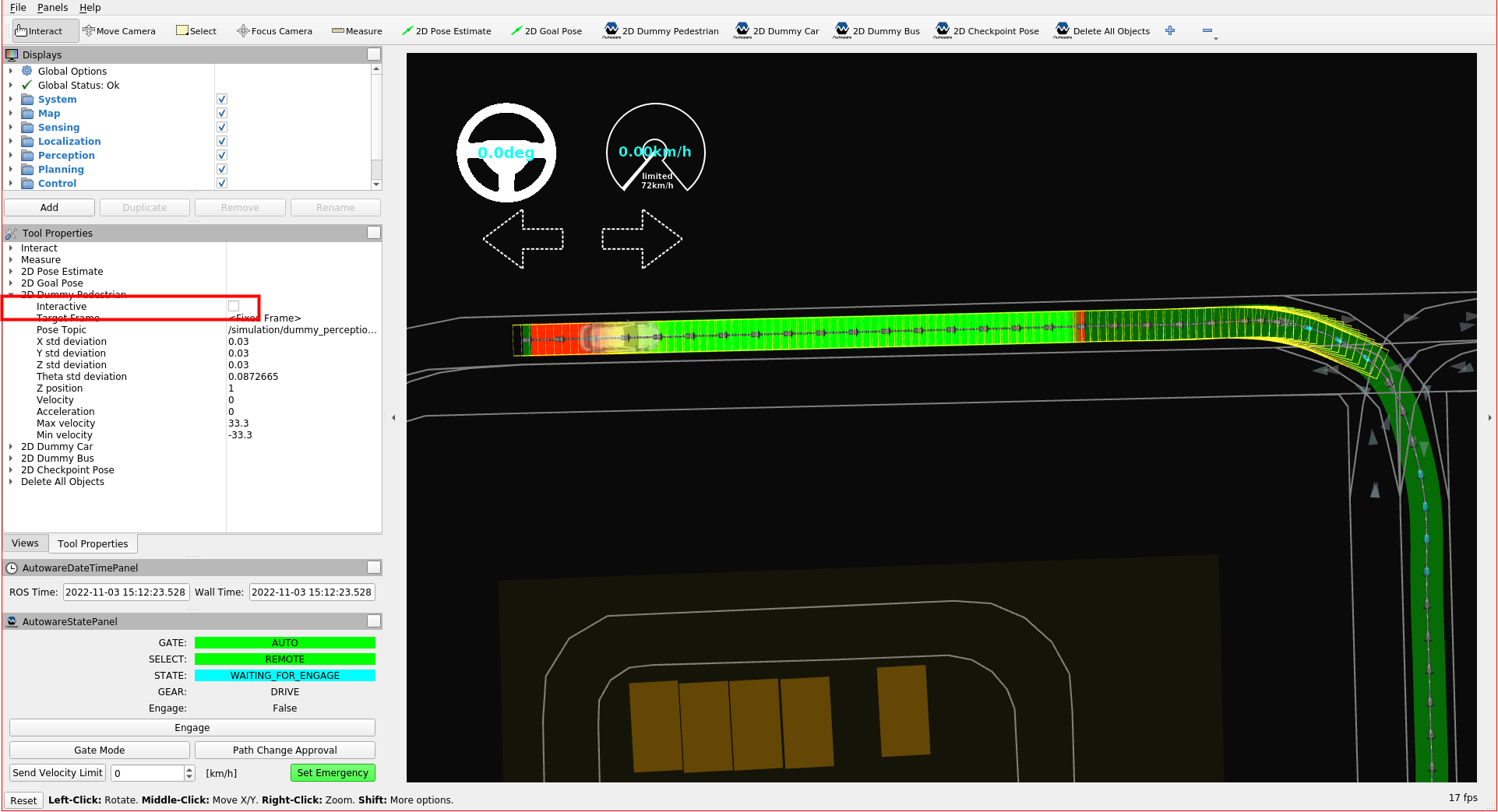
-
要添加交互式虚拟对象,请按
SHIFT并单击右键单击. - 要删除交互式虚拟对象,请按
ALT并单击右键单击. -
要移动交互式虚拟对象,请按住
右键单击拖放对象.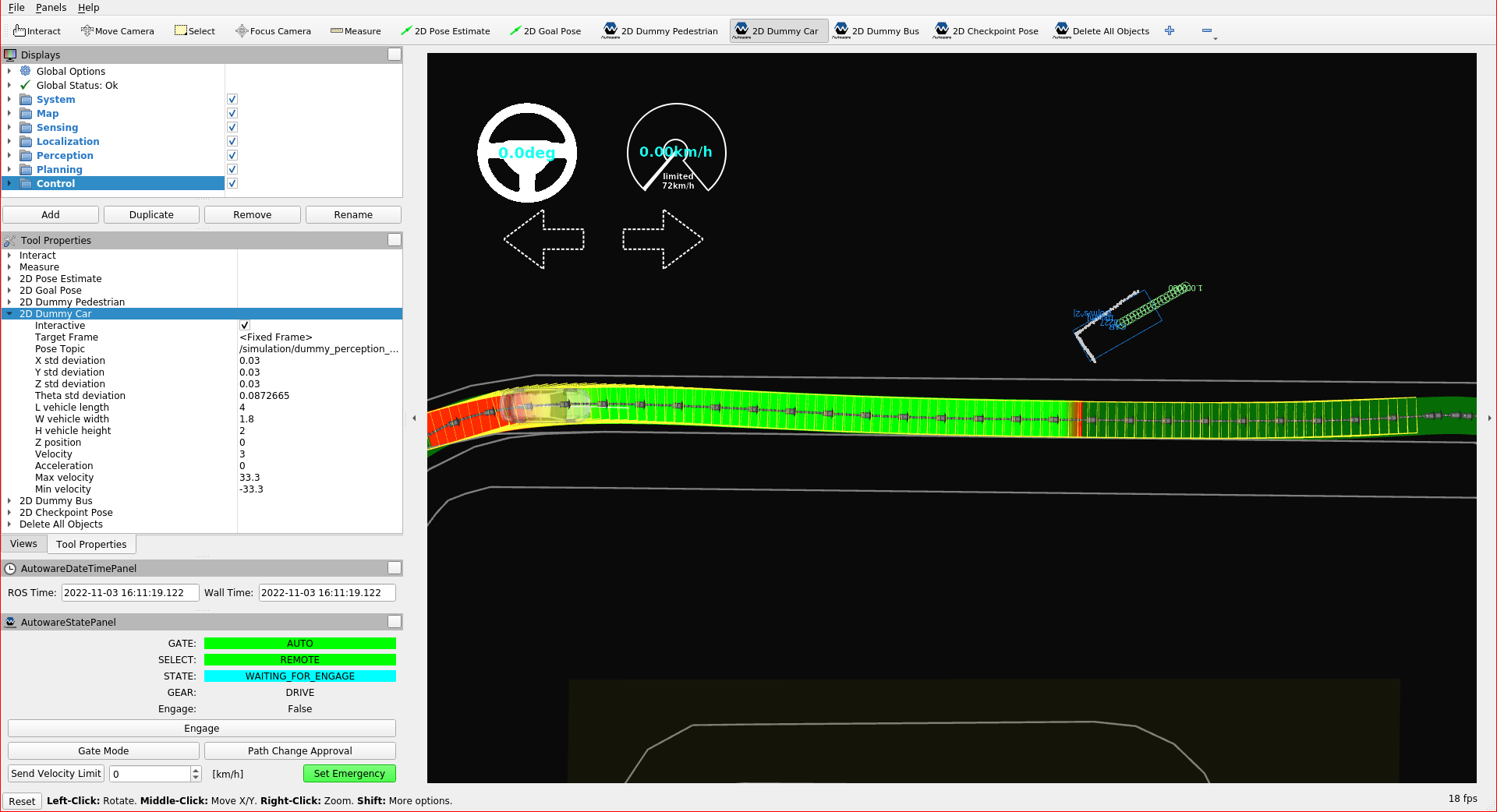
红绿灯识别模拟#
By default, traffic lights on the map are all treated as if they are set to green. As a result, when a path is created that passed through an intersection with a traffic light, the ego vehicle will drive through the intersection without stopping.
默认情况下,地图上的交通信号灯都被视为设置为绿色.因此,当创建一条穿过有红绿灯的十字路口的路径时,自我车辆将不停地驶过十字路口.
The following steps explain how to set and reset traffic lights in order to test how the Planning component will respond.
以下步骤说明如何设置和重置交通信号灯,以测试 Planning 组件将如何响应.
设置红绿灯#
-
转到
Panels -> Add new panel, 选择TrafficLightPublishPanel, ,然后按OK. -
在
TrafficLightPublishPanel中,设置红绿灯的ID和颜色. -
点击
SET按钮.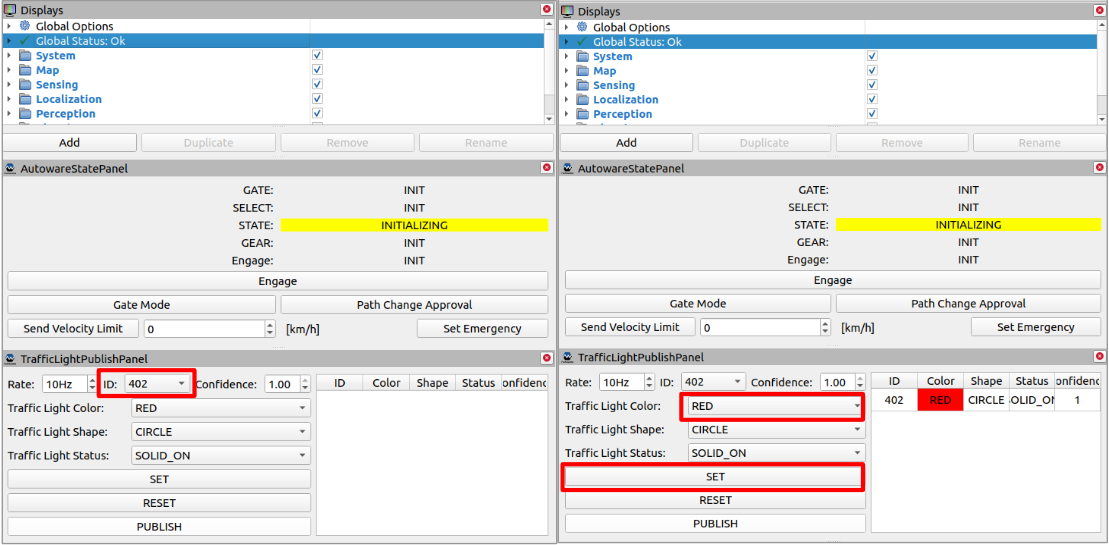
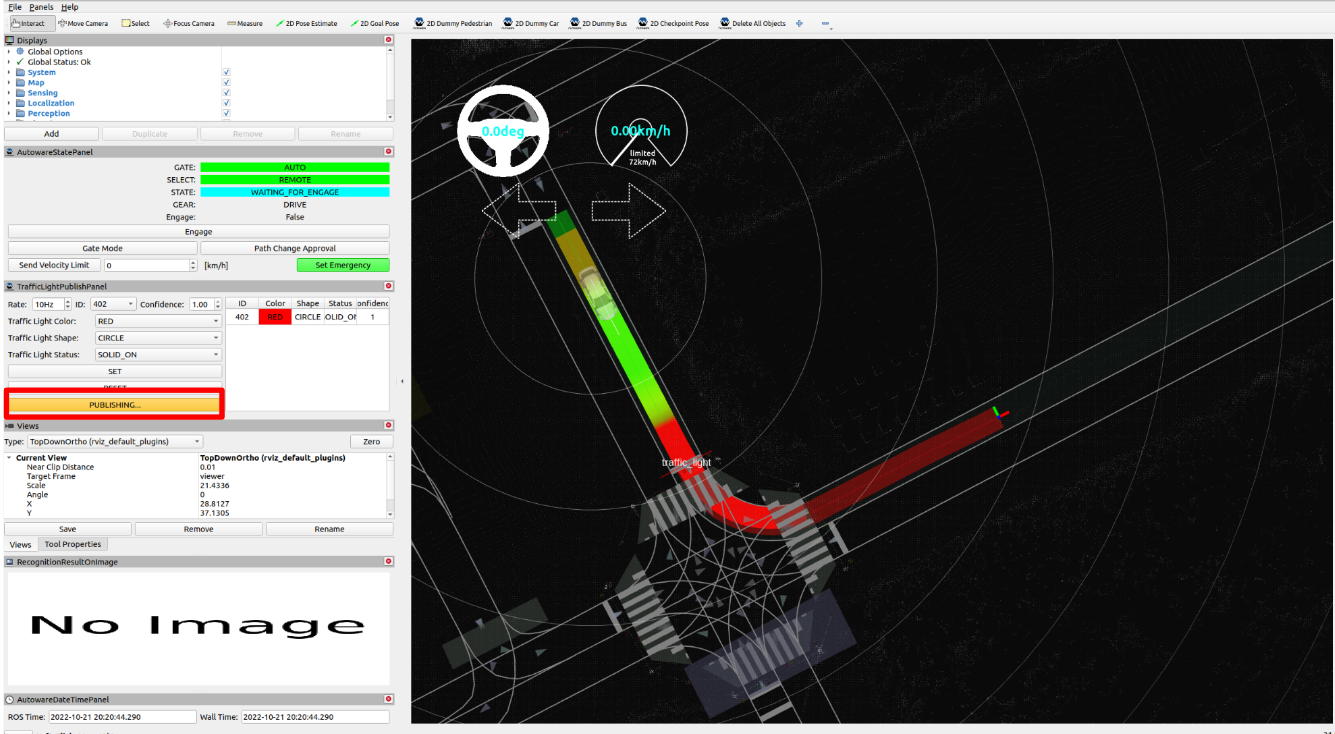
-
最后,单击
发布按钮将红绿灯状态发送到模拟器.然后,任何经过所选交通信号灯的计划路径都将相应地更改.
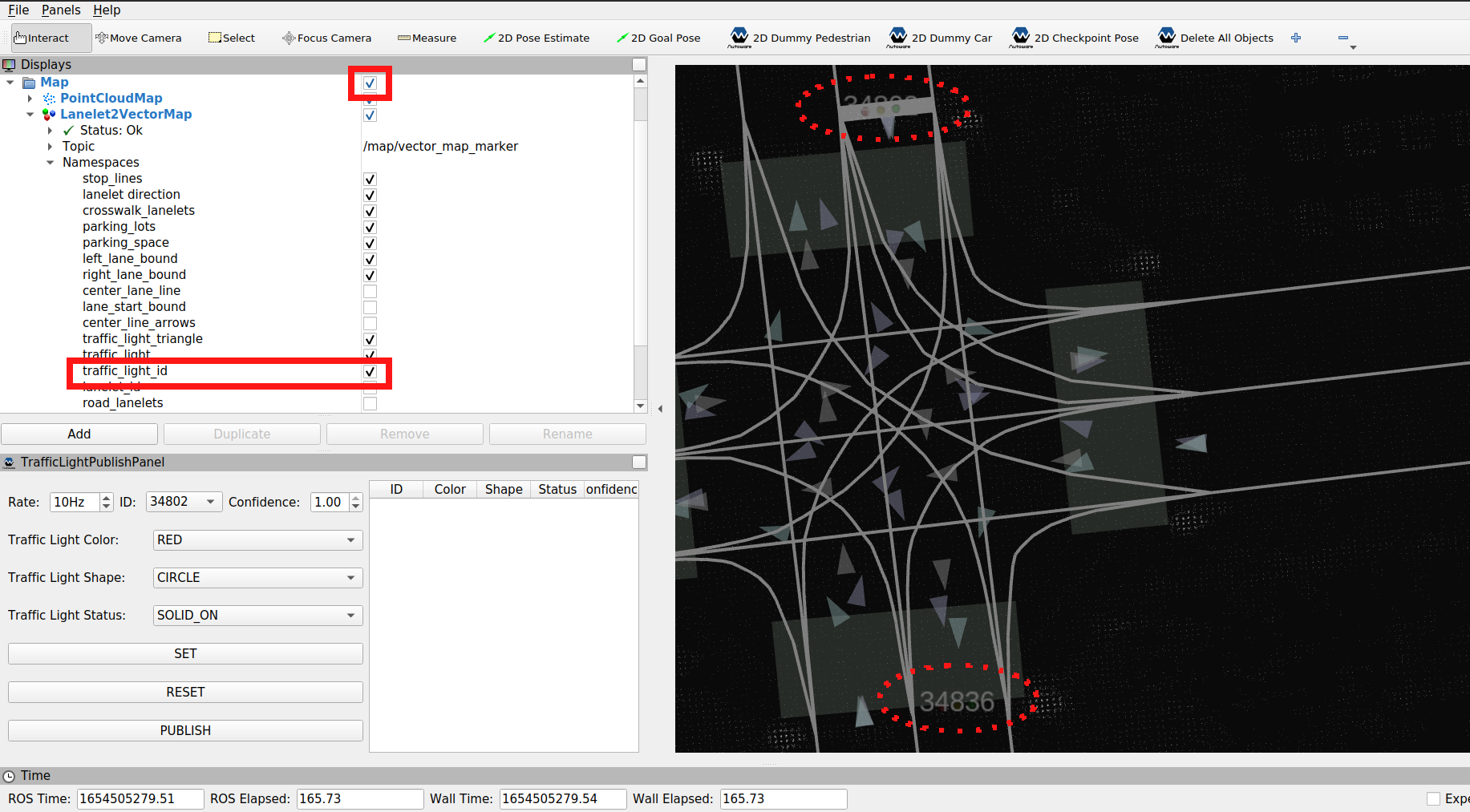
默认情况下,Rviz 应在地图上显示每个红绿灯的 ID.您可以通过放大区域或更改 View 类型来更仔细地查看 ID.
如果未显示 ID,请尝试以下故障排除步骤:
a) 在 显示 面板中,通过切换 映射 > Lanelet2VectorMap >命名空间 旁边的三角形图标来找到 traffic_light_id 主题.
b) 选中 traffic_light_id 复选框.
c) 通过单击两次 Map 复选框重新加载主题.
更新/重置交通信号灯#
You can update the color of the traffic light by selecting the next color (in the image it is GREEN) and clicking SET button. In the image the traffic light in front of the ego vehicle changed from RED to GREEN and the vehicle restarted.
您可以通过选择下一种颜色(在图像中为 绿色 )并单击 设置 按钮来更新交通信号灯的颜色.在图像中,自我车辆前方的交通信号灯从 红色 变为 绿色 ,车辆重新启动.

To remove a traffic light from TrafficLightPublishPanel, click the RESET button.
要从 TrafficLightPublishPanel 中删除红绿灯,请单击 RESET 按钮.
使用 Autoware Launch GUI#
本节提供了使用 Autoware Launch GUI 规划仿真的分步指南,提供了 Basic simulations 部分中提供的命令行说明的替代方案.
Autoware Launch GUI 入门#
-
安装: 确保您已安装 Autoware Launch GUI.安装说明.
-
启动 GUI: 从应用程序菜单中打开 Autoware Launch GUI.
启动 Planning 模拟#
车道驾驶场景#
-
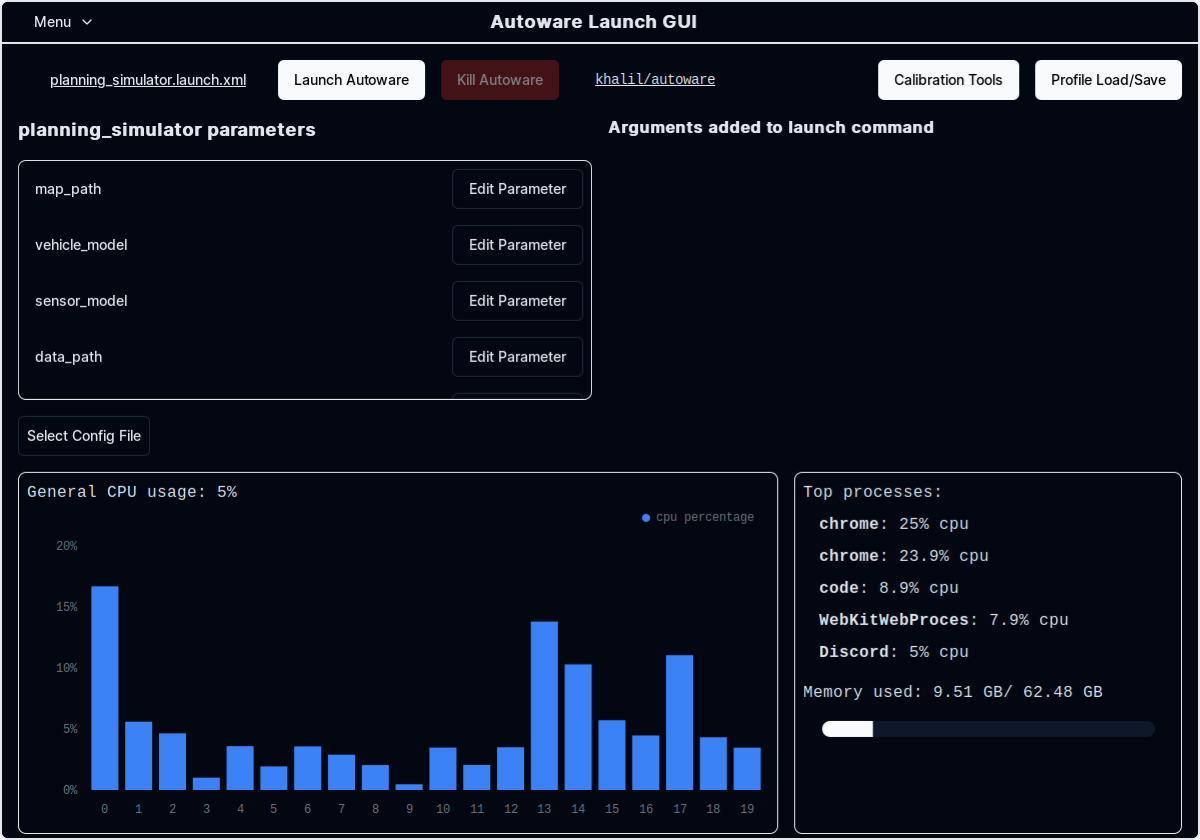
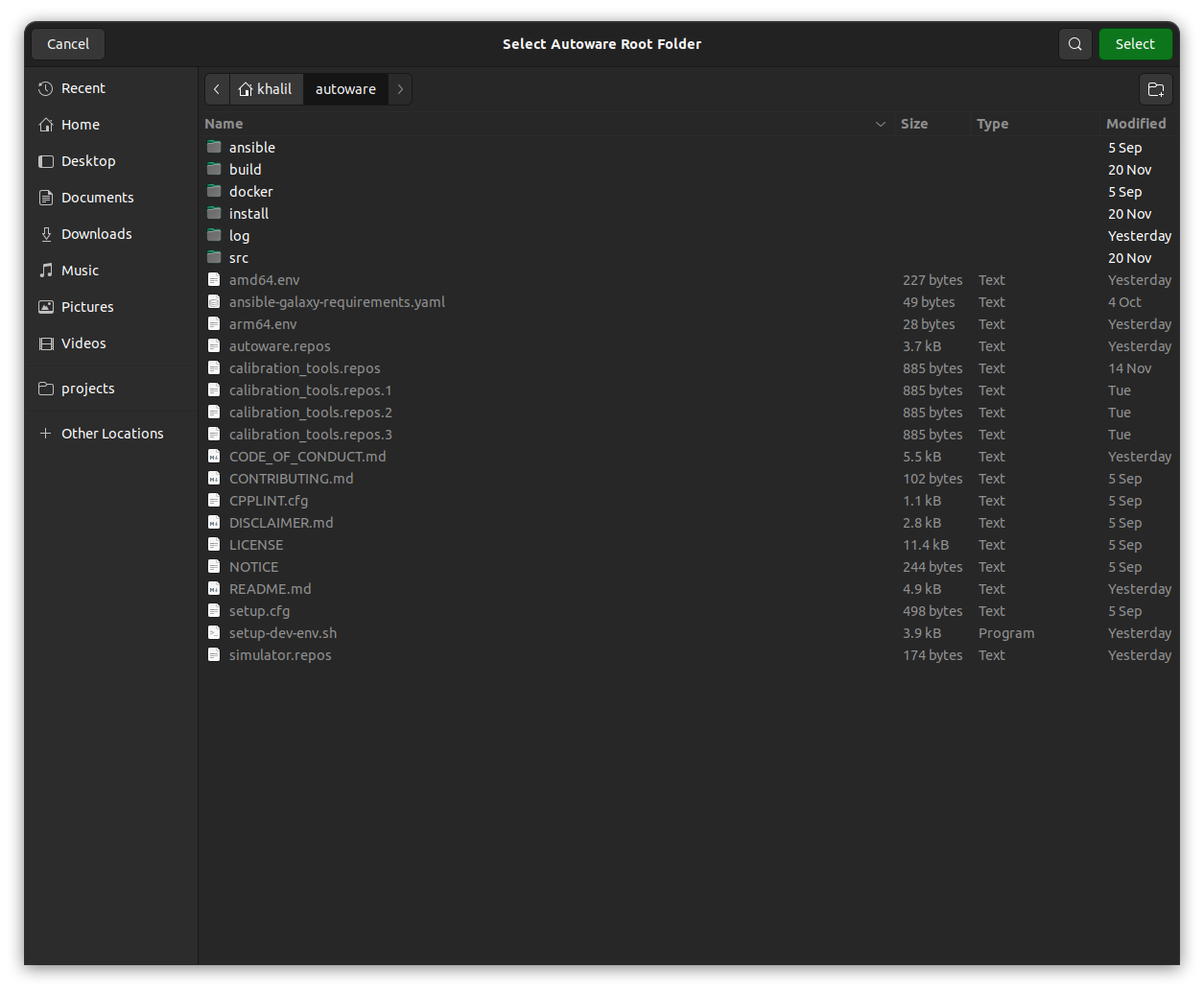
设置 Autoware 路径: 在 GUI 中,设置 Autoware 安装的路径.
-
选择 Launch File(启动文件): 选择
planning_simulator.launch.xml作为车道行驶场景.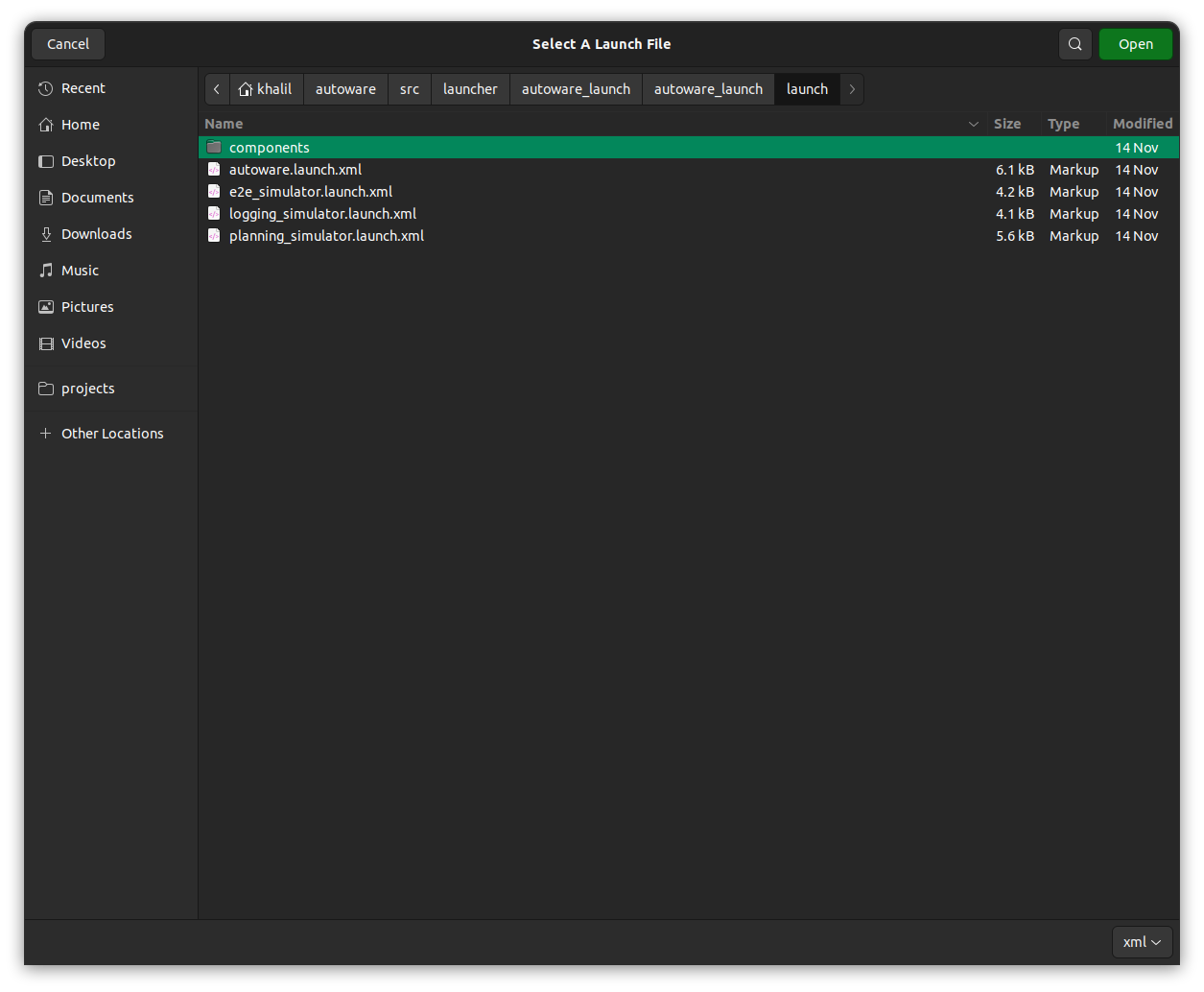
-
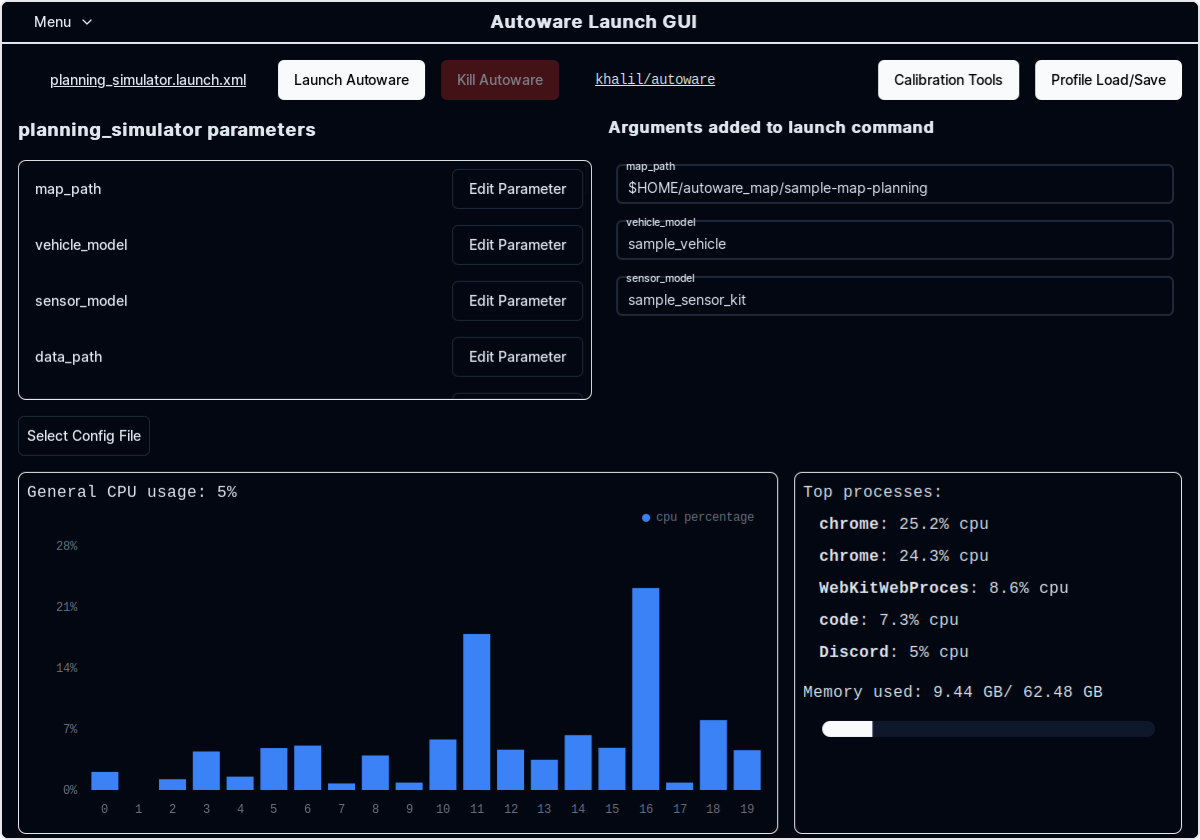
自定义参数: 根据需要调整
map_path、vehicle_model和sensor_model等参数.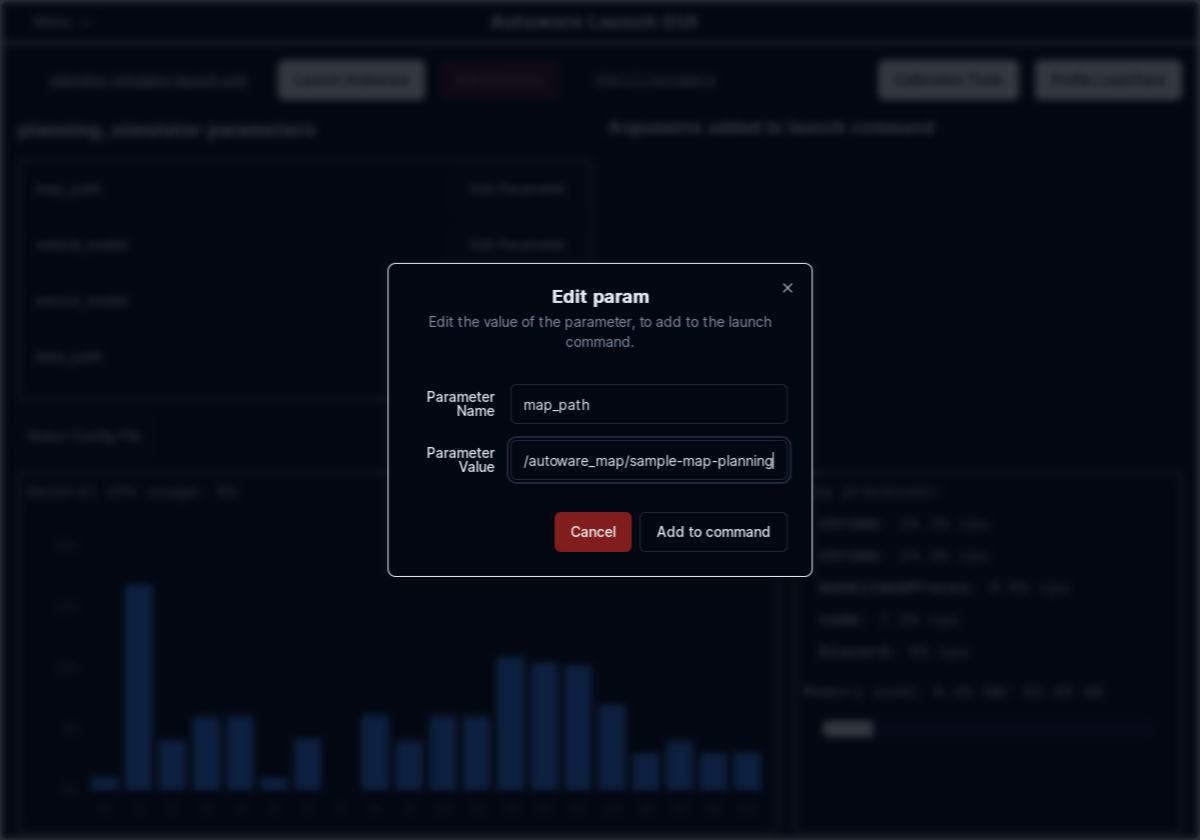
-
开始模拟: 单击启动按钮开始模拟.
-
任何场景: 在这里,您可以按照
- 车道驾驶场景: Lane Driving Scenario
- 停车场景: Parking scenario
- 变道场景: Lane change scenario
- 避免情况: Avoidance scenario
- 高级模拟: Advanced Simulations
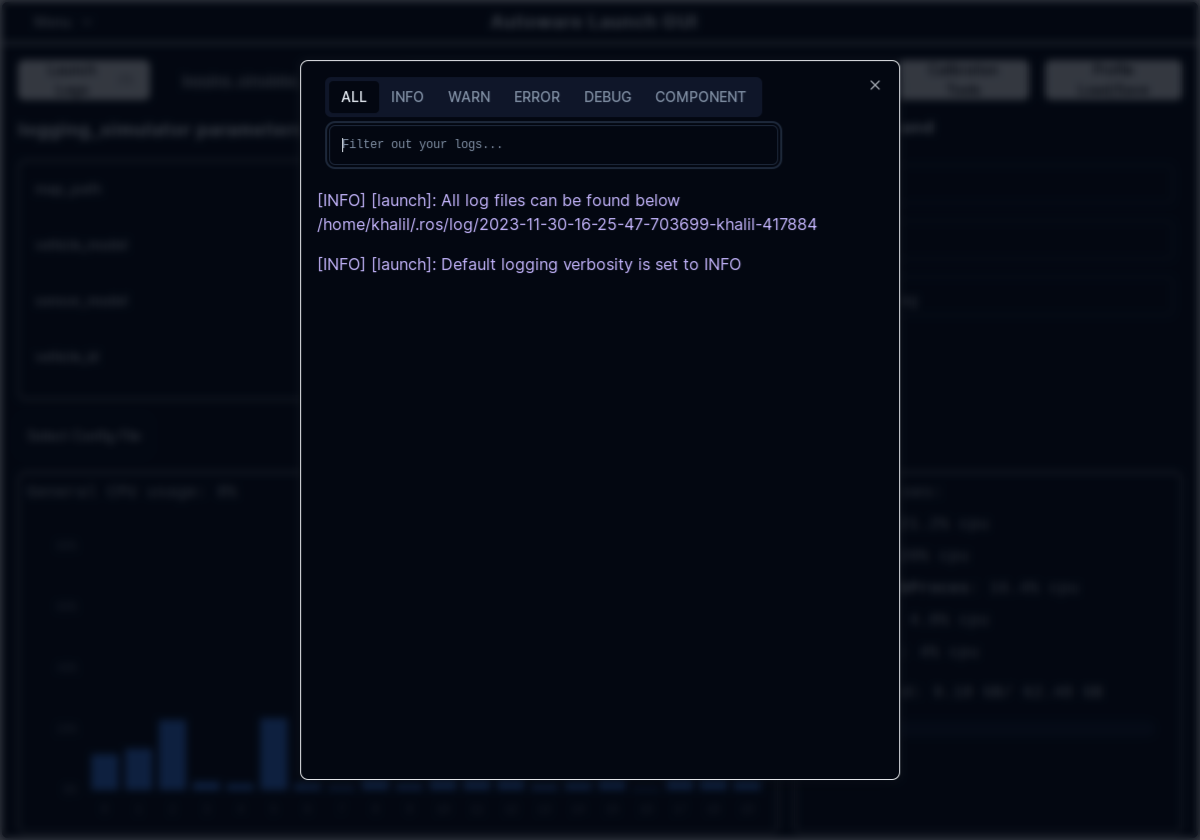
监控和管理模拟#
- 实时监控: 使用 GUI 实时监控 CPU/内存使用情况和 Autoware 日志.
- 配置文件管理: 保存您的仿真配置文件,以便在将来的仿真中快速访问.
- 调整参数: 通过 GUI 轻松即时修改仿真参数.
想用您的自定义地图试试 Autoware?#
以上内容描述了使用示例地图在规划模拟器中执行某些作的过程.如果您有兴趣使用自己环境的地图运行 Autoware,请访问 如何创建矢量地图 部分以获取指导.