SC-A-LOAM#
什么是 SC-A-LOAM?#
- 集成了 A-LOAM 和 ScanContext 的实时 LiDAR SLAM 软件包.
存储库信息#
原始仓库 link#
https://github.com/gisbi-kim/SC-A-LOAM
Required Sensors#
- LIDAR [VLP-16, HDL-32, HDL-64, Ouster OS1-64]
Prerequisites (dependencies)#
- ROS
- GTSAM version 4.x.
-
如果未安装 GTSAM,请按照以下步骤作.
wget -O ~/Downloads/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.2.zip cd ~/Downloads/ && unzip gtsam.zip -d ~/Downloads/ cd ~/Downloads/gtsam-4.0.2/ mkdir build && cd build cmake -DGTSAM_BUILD_WITH_MARCH_NATIVE=OFF .. sudo make install -j8
ROS 兼容性#
- ROS 1
构建并运行#
1) 构建#
-
首先,安装上述依赖项并按照以下几行作.
mkdir -p ~/catkin_scaloam_ws/src cd ~/catkin_scaloam_ws/src git clone https://github.com/gisbi-kim/SC-A-LOAM.git cd ../ catkin_make source ~/catkin_scaloam_ws/devel/setup.bash
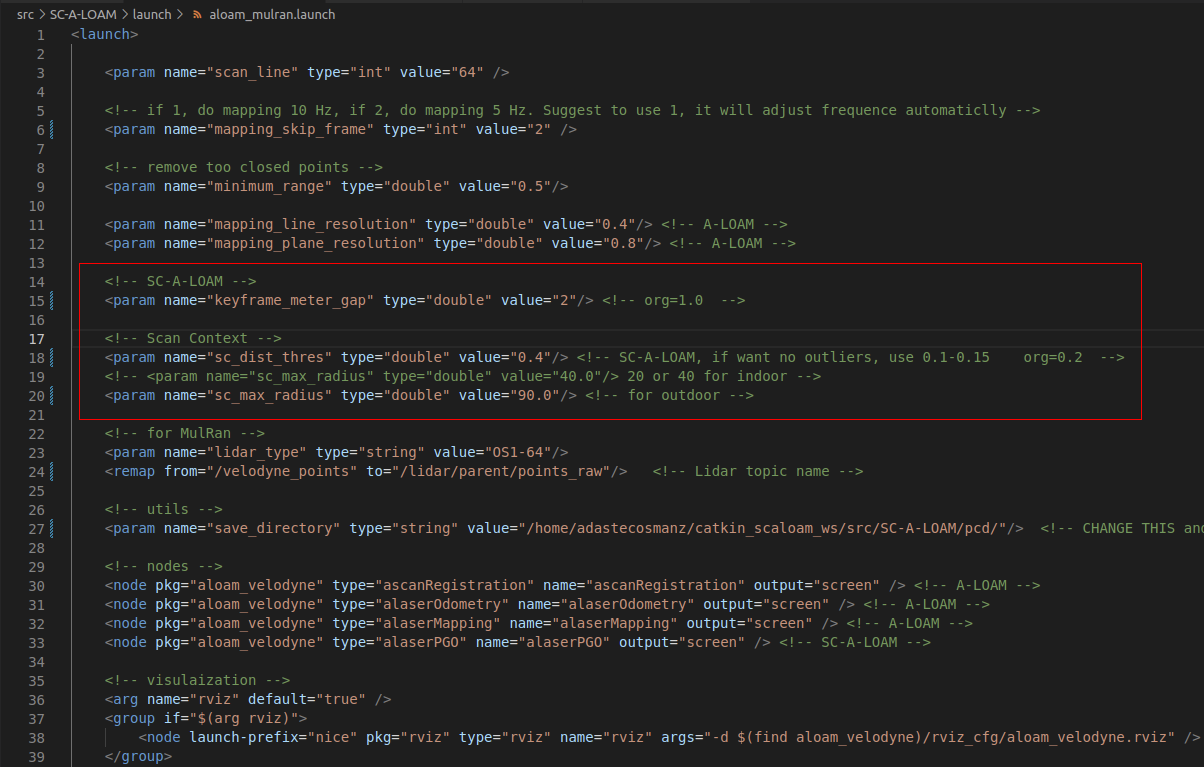
2) 设置参数#
- 下载存储库后,更改启动文件的主题和传感器设置.
扫描上下文参数#
- 如果遇到重影错误或循环未关闭,请更改扫描上下文参数.
- 使用标记区域中的参数调整扫描上下文设置.
3) 运行#
roslaunch aloam_velodyne aloam_mulran.launch
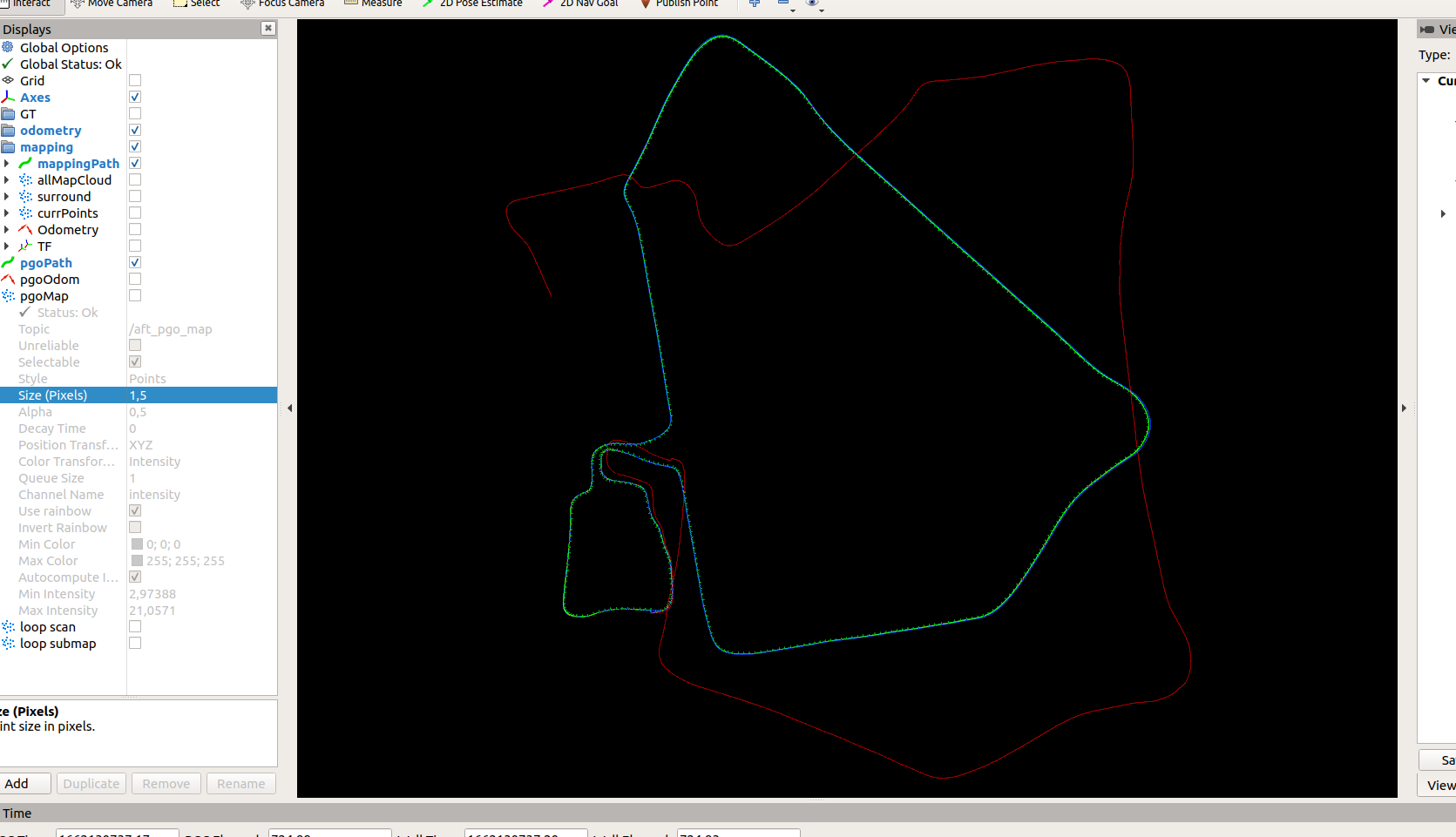
4) 另存为 PCD 文件#
rosrun pcl_ros pointcloud_to_pcd input:=/aft_pgo_map
示例结果#
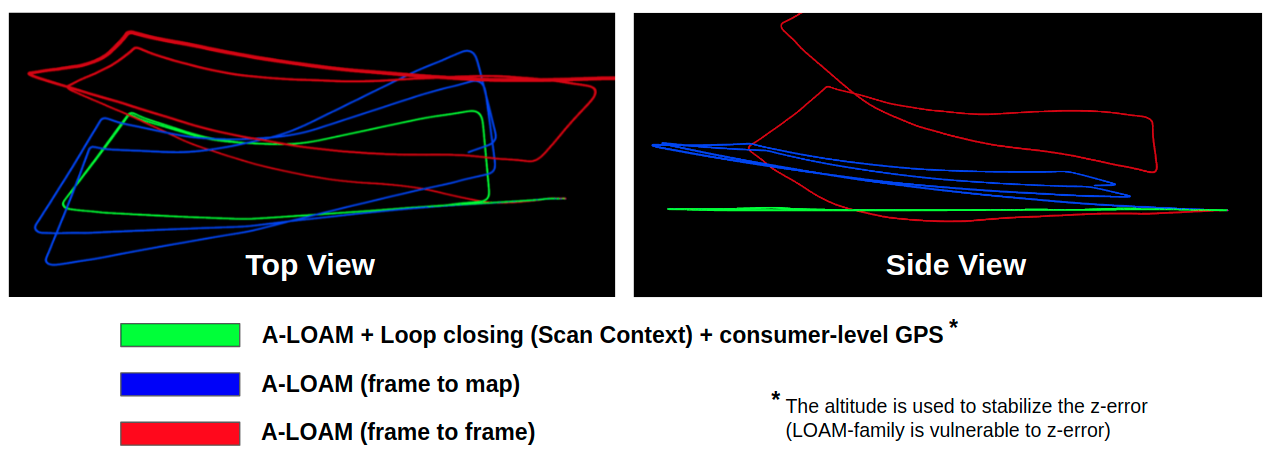
Riverside 01 / MulRan 数据集#
- MulRan 数据集提供激光雷达扫描(Ouster OS1-64,水平安装,10Hz)和消费级 gps(u-blox EVK-7P,4Hz)数据.
- 关于(发布数据)数据的使用方法:请参阅此处 https://github.com/irapkaist/file_player_mulran
-
Riverside 01 序列上的示例视频.
1. 具有消费级基于 GPS 的高度稳定功能: https://youtu.be/FwAVX5TVm04 2. 没有 Z 稳定: https://youtu.be/okML_zNadhY
-
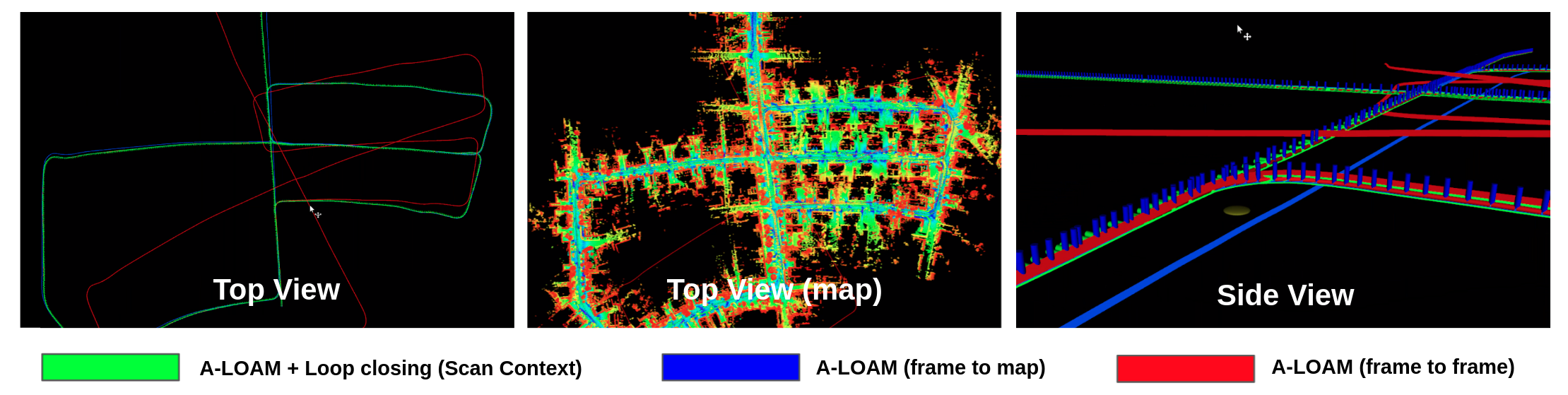
示例结果:
KITTI 05#
-
对于 KITTI(HDL-64 传感器),使用命令
roslaunch aloam_velodyne aloam_velodyne_HDL_64.launch # for KITTI dataset setting
- 要发布 KITTI 扫描,您可以使用 mini-kitti publisher,这是一个简单的 python 脚本:https://github.com/gisbi-kim/mini-kitti-publisher
- 示例视频(此处未使用 GPS):https://youtu.be/hk3Xx8SKkv4
-
示例结果: